柔性梳刷式枸杞采收机械结构设计与建模仿真分析
作者: 姜彦武 韩长杰 郭俊先 马俊贵
摘要 设计了一种以柔性回转梳刷式采收为工作原理的骑跨式枸杞采收机械,该机械主要由采摘装置、收集装置、传动结构、行走装置、机架等部分组成,理论上可一次性实现枸杞的摘落、低损收集、清选等功能。运用SolidWorks 2022软件完成了三维建模,Ansys Workbench 2022软件对核心构件——梳刷组件进行了有限元仿真试验,结果表明机架的最大应力为58.79 MPa,小于材料的最大强度极限,最大应变量约0.000 3 mm,满足材料强度要求。自由模态分析结果发现,前3阶模态固有频率几乎为0,表现为刚体模态,从第4阶开始表现为弹性模态,前10阶模态的频率呈逐渐升高的趋势,且最高频率约9.470 0 Hz,与机器频率相差较大,验证了整机结构方案和选材设计的合理性。该采收机械的设计可为后期进一步研究低损伤枸杞机械化采收提供参考。
关键词 枸杞;采收;三维建模;有限元分析
中图分类号 S 225 文献标识码 A
文章编号 0517-6611(2024)12-0192-05
doi:10.3969/j.issn.0517-6611.2024.12.040
Structure Design and Modeling Simulation Analysis of Flexible Brush Type Wolfberry Harvesting Machinery
JIANG Yan-wu1,2,3, HAN Chang-jie1,3,GUO Jun-xian1,3 et al
(1.College of Mechanical and Electrical Engineering, Xinjiang Agricultural University,Urumqi,Xinjiang 830052;2.College of Mechanical and Electronic Engineering,Northwest A&F University, Yangling, Shaanxi 712100;3.Xinjiang Key Laboratory of Intelligent Agricultural Equipment,Urumqi, Xinjiang 830052)
Abstract A kind of riding straddle type wolfberry harvesting machinery with flexible rotary comb brush harvest as the working principle was designed, which was composed of picking device, collection device, transmission structure, walking device, frame and other parts.Theoretically, it can implement picking wolfberry, low-loss collection, cleaning and other functions at once. SolidWorks software 2022 was used to complete the 3D modeling,and Ansys Workbench 2022 software was used to conduct the finite element simulation experiment on the core component brush component.The results showed that the maximum strain of the frame was 58.79 MPa, which was smaller than the yield strength limit of the materials.And the maximum strain variable was 0.000 3 mm, which could meet the strength requirements of the materials.The free mode analysis results showed that the inherent frequency of the first 3 modes was almost zero, which was manifested as rigid body mode.Starting from the fourth mode, it was manifested as elastic mode.The frequency of the first 10 modes gradually increased, and the highest value was about 9.470 0 Hz, which was quite different from the machine frequency, which verified the rationality of the structure scheme and material selection design of the whole machine.The design of the harvester could provide references for further study of low-damage mechanized harvesting of wolfberry.
Key words Wolfberry;Harvesting;Three-dimensional modeling;Finite element analysis
基金项目 新疆维吾尔自治区自然科学基金项目(2022D01B29);新疆维吾尔自治区科协青年人才托举工程项目(XHXM2021058)。
作者简介 姜彦武(1989—),男,甘肃定西人,副教授,在读博士,从事林果智能化采收与果园智能作业装备。
收稿日期 2023-07-11
枸杞兼具生态、经济、文化与健康产业等功能,对产业结构优化、农民增收及乡村振兴发展具有重要意义[1]。近年来,在市场需求和地方政府产业政策扶持的带动下,全国枸杞种植规模逐步扩大。2020年,我国枸杞产量为44.12万t,同比增长10.2%。我国枸杞年产量占全世界枸杞总产量的95%以上,不仅满足了国内市场需求,而且能满足日益增长的国际市场需求[2]。枸杞属于无限花序浆果类果实,在采收成熟果实的过程中极易捏烂,采摘时要轻采、轻拿、轻放,同时要保护好未成熟的果实、花、叶和枝干,且不能影响成熟果实的品质,因此采收难度大,对采收人员的专业要求较高。枸杞收获环节基本是人工采收,缺乏机械化采收机械。枸杞采摘季节性强,劳动力需求大,目前采摘已经成为枸杞产业发展的一个重大瓶颈。高额的成本不仅会制约枸杞产业的增效,而且会影响枸杞产业规模化、集约化发展,严重制约了枸杞产业的发展[3]。
近年来,国内众多学者针对枸杞机械化采收开展了多方面的研究。陈军等[4]融合振动和梳刷原理,设计了一种便携振刷式枸杞采收机;徐丽明等[5]采用梳刷、振动相结合的采收方式,设计了一种梳刷振动式枸杞收获装置;梅松等[6]研制了基于往复振动方法的枸杞低损采收装备;万芳新等[7]研制了能够一次性完成枸杞果实采摘、输送、清选、收集工作的自走式枸杞振动采摘机。现阶段研制出的手持式和自走式枸杞采收机工作效率高,损伤率和误采率也较高,但目前还没有任何一种机型得到全面推广应用。枸杞采收机械化的相关问题仍需要深入研究。笔者结合现有技术基础,设计了一种柔性梳刷式枸杞采收装置,完成了三维虚拟样机设计,利用有限元软件对关键构件梳刷组件进行了仿真试验分析,并对整机原理设计和选材合理性进行了理论验证,以期为枸杞采收机械化提供一定的借鉴。
1 整机结构与工作原理
1.1 新疆枸杞种植情况
新疆枸杞主要种植地区——精河县2022年枸杞种植面积达0.67万hm2。枸杞种植业已成为精河县最具特色的主导产业,年产值约6亿元,枸杞产业收入占农牧民纯收入的21%。当地枸杞示范田践行“良种良法,良种先行”的发展理念,主栽品种精杞1号、精杞2号、精杞4号、精杞5号、新疆黑枸杞5个枸杞自主品种,采用高产栽培模式,株行距为1 m×3 m,种植密度4 995株/hm2,统一种植、统一品种、统一管理、统一销售,大力推广枸杞新品种、高效节水滴灌、机械化栽培、生物防控等技术[8]。
1.2 整机结构与工作原理
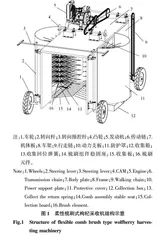
设计的柔性梳刷式枸杞采收机是由发动机提供动力,主体结构由采摘机构、收集装置、行走机构、传动装置、转向操控装置等组成(图1),能完成枸杞的采摘、收集作业。采摘机构是该机的核心部件,位于整机中间位置,发动机通过链传动方式将动力传递给凸轮,凸轮作用于梳刷杆使其进行上下振动,机器行进过程中枸杞枝条与梳刷元件之间产生相互作用,梳刷元件回转与凸轮作用梳刷杆轴的上下振动联合作用,达到柔性采摘枸杞的目的。收集装置位于梳刷杆下方,由第一收集板和第二收集板组成,收集板通过与车架连接的弹簧使落在收集板的枸杞向后运动,落入两侧收集箱中,收集板可进行轴向运动,保证枸杞进入采收区域时其茎秆不受损伤。第一、二收集板材质选用柔性橡胶,保证枸杞落到收集板后尽可能减少摔落损伤。转向操控装置由转向操控杆、转向杆组成,需人工辅助实现方向位置变换。工作时采摘机构骑跨于枸杞丛纵向行驶,枸杞进入采摘机构会带动梳刷杆形成上下往复配合、梳齿间隔分布的回转运动,进而将成熟枸杞梳刷振落于收集板上,收集板与机架经弹簧固接形成倾斜角度,便于适应枸杞主杆粗细度以及枸杞掉落的缓冲收集,最终枸杞下落到两侧收集箱中,完成采收。
1.3 主要设计参数
柔性梳刷式枸杞采收机的主要性能参数如下:配套动力 35 kW,作业速度3~5 km/h,作业宽度1 500 mm,骑跨高度1 700 mm,长、宽、高分别为3 303、2 799和2 209 mm。
2 关键结构与技术参数分析
2.1 采摘装置
采摘装置是枸杞采收机械的核心部件。主体部件由梳刷轴、梳刷齿、轴承、梳刷组件稳固座、弹簧和梳刷固定盘组成。间隔等距分布的柔性梳刷齿由直径5 mm,高分别为608、460 mm的圆柱形长条组成,呈圆周排列在外径72 mm、厚5 mm的梳刷齿固定盘上,梳刷齿固定盘横向均匀分布在梳刷轴上。梳刷齿选用柔性高弹性软橡胶材质,保证工作时不会损伤枸杞,达到柔性梳刷的目的。梳刷轴通过螺栓连接的方式固定在车架上。每个梳刷固定盘内部安装轴承,保证采摘装置在碰到树枝后能产生自转,从而将树枝产生的阻力化解,实现连续采收。梳刷组件稳固座安装在车架上,内部装有弹簧,保证梳刷轴上下振动时有一定的缓冲力。采收装置结构如图2所示。
此外,在梳刷组件轴体的顶端,机体分别设有第一凸轮和第二凸轮,轴体顶端设计有顶板,与凸轮相接触,形成梳刷组件动力的传递。应用达朗伯原理,把动态构件化为顺时静态构件分析是力学中的常用方法[9]。动力传输凸轮振动的动力学模型如图3所示。图中:m为梳刷轴的等效质量,k2为推杆刚度,k3为压缩弹簧刚度;考虑到构建弹性,推杆位移y≠yc,y为推杆的实际位移,yc为凸轮轮廓线产生的位移。
2.2 收集装置
收集装置为枸杞采收的核心部件之一,共2排,收集板倾角按照30°相对放置。收集板设计长度为712 mm,总宽560 mm。收集板均包括第一板体。第二板体和弹性件。第二板体相对于第一板体可摆动;弹性件的一端与机架相连,弹性件的另一端与第二板体相连,具有一定的回弹特性。枸杞经梳刷原件作用落到收集板上,之后滑入两侧收集箱中。收集板材料选用柔性橡胶板,橡胶耐磨、耐寒、弹性大,在自身作用力解除后能很快恢复原来的形状,并能最大限度地减少对枸杞外观的损坏。收集装置三维结构如图4所示。