基于优化模糊PID控制器的精准施肥算法研究与应用
作者: 李怀胜 崔瑜
摘要 针对农业生产灌溉施肥过程中水肥施用精度不高,造成资源浪费、土壤板制化的问题,该研究设计了一种基于粒子群优化(PSO)的模糊PID 算法控制施肥机的灌溉施肥过程。首先,针对施肥的相关模块以及相应参数,建立施肥机数学模型。然而,基于MATLAB/Simulink平台分别搭建PID控制器、模糊PID控制器以及该文提出的控制器,对建立的系统数学模型进行了控制。仿真结果表明,该控制算法响应时间缩短至30 s,相较于PID、模糊PID分别缩短了63.4%和55.9%。该控制算法除了前期震荡外,基本不存在超调量。为了验证该算法在实际应用中的可靠性,设计了不同压强下的精度控制试验。结果表明,基于PSO优化的模糊PID控制器在各个压强下都具有良好的控制效果,控制精度在2%左右,而PID控制器的控制精度在20%左右,模糊PID控制器的控制精度在10%左右。由此可见,该研究提出的控制算法在实际应用过程中能够提升灌溉精度。
关键词 水肥一体化;模糊控制;复合控制;实验验证
中图分类号 S232.3 文献标识码 A 文章编号 0517-6611(2024)15-0203-05
doi:10.3969/j.issn.0517-6611.2024.15.043
开放科学(资源服务)标识码(OSID):
Research and Application of Precise Fertilization Algorithm Based on Optimal Fuzzy PID Controller
LI Huai-sheng, CUI Yu
(Institute of Agricultural Science(Institute of Animal Science),9th Division of Xinjiang Production and Construction Corps,Emin,Xinjiang 834601)
Abstract In the process of irrigation and fertilization in agricultural production,the application accuracy of water and fertilizer is not high,resulting in resource waste and soil plate formation.In this study,a fuzzy PID algorithm based on PSO optimization was designed to control the irrigation and fertilization process of the fertilizer applicator.Firstly,the mathematical model of fertilizer applicator was established according to the relevant modules and parameters of fertilization.Based on MATLAB/Simulink platform,PID controller,fuzzy PID controller and the controller proposed in this paper were built respectively to control the mathematical model of the established system.The simulation results showed that the response time of the proposed control algorithm was reduced to 30 s,which was reduced by 63.4% and 55.9% respectively compared with PID and fuzzy PID.In terms of overshoot,there was basically no overshoot in the proposed control algorithm except for the early oscillation.In order to verify the reliability of the algorithm in practical application,this paper designed precision control tests under different five groups of pressures,and the test results showed that the fuzzy PID control based on PSO optimization had good control effect under various pressures.The control accuracy was concentrated in about 2%,while the control accuracy of PID control was about 20%,and the control accuracy of fuzzy PID control was about 10%.It could be seen that the control algorithm proposed in this study could improve the irrigation accuracy in the practical application process.
Key words Integration of water and fertilizer;Fuzzy control;Compound control;Test verification
水肥的不均衡施加容易造成土壤的板制化以及农作物的减产[1]。精准施肥控制逐渐成为目前水肥控制的重要发展趋势[2]。在植物生长过程中,调节植物对施用量的需求是目前农作物生产的重要内容。流量控制过程需要考虑指标延迟等因素,宏观上讲,水肥一体化灌溉施肥过程中流量值的调节存在严重的时变性、非线性及迟滞性,给水肥的调节过程带来一定的难度。目前水肥一体化的研究主要集中在控制算法及数学模型2个方面[3]。精确的数学模型有利于分析施肥机施肥过程中的各项性能指标,也为接下来的控制提供必要的精准性。数字模型的建立,需要先进的控制算法来调控灌溉施肥过程[4-5]。
若以水肥一体化控制过程中的各项特性作为控制优化的目标,传统的PID控制已经不能满足调控过程中的指标需求。在考虑施肥系统迟滞性的前提下,刘艳妮等[6]提出一种参数自适应调整的Fuzzy-PID控制方法,该方法对模型精准性需求不高,但容易陷入死区。针对不同隶属度函数的设定与需求,提出一种新型的模糊控制规则,该研究设计了对笔者提出算法的验证分析,结果表明:相较于传统的控制方式,该控制方式超调量减少32%,调节时间缩短90 s。彭娜等[7]建立了灰色预测模型,重点研究了灌溉过程中肥料的施用和模糊PID控制的实施。在灰色预测的基础上,对水、肥泵的转速进行了模糊PID控制。考虑到血球藻液流量值控制系统的许多缺点,比如非线性、时变性、严重滞后性和不确定数学模型等,全彦涛等[8]提出了一种基于模糊PID的流量控制方法。目前模糊PID算法的研究已相对成熟。这种算法既可以满足模糊控制快速调节的特性,又可以实现PID相对精准的控制作用。然而,模糊PID算法对PID算法的优化效果较差,因此需要提出新型的参数调节算法。
相关研究人员集中研究了基于算法优化的模糊PID控制。大量的优化算法已经被提出,比如遗传算法、著名的神经网络算法和蚁群算法[9-10]。参数调整的优化主要包括2个方面的考虑:一是寻求全局最小点,二是要有很好的收敛速度。神经网络算法目前主要被应用于PID控制领域,其优点是可以按梯度下降方向优化到局部最小点,进而获得更有利的控制。李冬冬等[11]通过神经网络预测控制和模糊控制对时变非线性模型的动态管理控制系统达到更精确的控制。但是,神经网络算法的缺点是容易陷入局部最小值;此外,遗传算法需要进行编码输出和解码设计,在某些情况下这些都是极其困难的,不能直接进行并行处理,计算量极其庞大。然而,粒子群优化(PSO)不具备遗传算法的编码和解码交叉、变异和设计过程的复杂思想,没有梯度信息,运行效率较快,实施方便,收敛迅速。基于PSO优化的PID控制是一种思想较为朴素、实用的新型整定方法,大大提升了PID 3个参数的优化水平,优化后控制系统的性能指标大幅度提升,在工业领域具有巨大的潜在价值[12-14]。
目前提出了一种改进的模糊PID控制器,根据误差范围来确定控制方法的选择,有效利用PSO来优化模糊控制器的3个比例参数。
在MATLAB/Simulink平台上进行仿真验证,通过比较PID控制算法、模糊控制算法、模糊PID控制算法和该文提出的控制算法,发现该研究所提出算法的性能指标优于其他控制算法。
为了验证该文所提出的算法投入生产实践的可靠性,笔者设计了相关试验,通过数据采集、读入主机、传递信号和提供决策指令来实现。
1 控制系统数学模型的建立
该系统的流量调节装置为电动比例阀,电动比例阀由驱动电机以及阀体组成。电机通过转动带动传动部分,从而对阀芯进行控制,从而实现对阀体的开度控制。电动比例阀实现对开度的控制,从而形成对流量的控制。电动比例阀由直流电机、调速器、数据采集检测模块、上位机控制器组成。直流电机:此装置通过接收上位机阀门开度电信号,由脉冲宽度调制技术(PWM)进行脉宽调制输出、控制脉冲,控制电机的正转或者反转以及时长,从而实现对阀门开度的增大或减小。
直流电机需要通过直流的驱动进行正常工作,所以需要将交流经过逆变形成直流电压。
电机对阀门阀芯的操作需要通过传动部分间接控制,传动部分由减速装置实现电机的转速控制,并提高输出的转矩,通过转杆的传动可将电机旋转的角位移转换为直线位移。
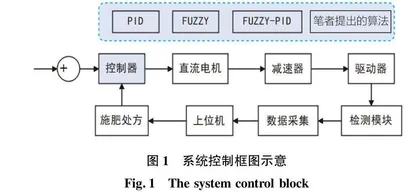
控制部分由控制终端微控制单元(MCU)以及控制盒组成。MCU是实现控制算法的关键器件,而控制盒则可根据 PWM 信号控制开关的通断,通过输出电机的驱动电压控制电机的转速、正反转及启停。 电动比例阀的控制采用闭环控制的策略,通过位置输入信号由控制器形成决策信号,通过调整电压的输出并驱动电机进行启停、正反转,电机对阀芯进行传动从而改变阀门开度的大小。位置传感器的作用是通过检测阀门开度信息,将其传输给控制器,从而形成一个闭环控制。系统控制原理框图如图1所示。
通过对液肥喷施变量控制系统控制部分电动比例阀的构成分析,传递函数由直流电机、减速装置、电压驱动构成电动比例阀开度控制。
直流电机传递函数:
直流电机是电动比例阀中的驱动装置,直流电机由于控制的高精度、容易控制的特点,在调速控制及正反转领域得到了广泛应用。电机转速及行程控制关系到阀控的精准操作,直流电机的电压与行程的传递函数推导过程如下。电机驱动电压的平衡方程式如下:
Ud(t)=RId+LdId(t)dt+E(t)(1)
其中,Ud(t)为直流电机的驱动电压,R为内阻,Id(t)为电驱电流,E(t)为电动势。
输出转矩的计算公式可表示如下:
M(t)=KId(t)(2)
式中,M(t)为直流电机输出的转矩,K为直流电机力矩系数。