1GZDY-120履带自走式遥控旋耕机的设计与试验
作者: 张俊杰 张西群 马力 高常增 王明涛 焦海涛
摘要 河北省果园管理机械化水平低,果园管理上劳动成本高。针对此问题研制一种1GZDY-120履带自走式遥控旋耕机,其集机械技术、电子集成控制技术和液压控制技术于一体。通过发射器发送指令,接收器接收指令传输至液压元件或电子元件,控制机具行走快慢、转向、旋耕机升降、旋转刀轴停转等动作,通过测试试验,测得最小转弯半径小、平均接地压力大,抓地能力强,旋耕深度适宜且稳定性好。
关键词 履带;遥控;旋耕机;设计
中图分类号 S 22 文献标识码 A
文章编号 0517-6611(2022)20-0193-04
doi:10.3969/j.issn.0517-6611.2022.20.050
Design and Experiment of 1GZDY-120 Crawler Self-propelled Remote Control Rotary Tiller
ZHANG Jun-jie1, ZHANG Xi-qun1, MA Li2 et al
(1.Hebei Agricultural Mechanization Research Institute Co., Ltd., Shijiazhuang, Hebei 050051;2.Qiu County Junma Machinery Co., Ltd., Handan, Hebei 057450)
Abstract The mechanization level of orchard management in Hebei Province is low, and the labor cost of orchard management is high.Aiming at this problem, a 1GZDY-120 crawler self-propelled remote control rotary tiller was developed, which integrated mechanical technology, electronic integrated control technology and hydraulic control technology.The transmitter transmitted the command, the receiver received the command to transmit to the hydraulic component or the electronic component, controlled the machine tool walking speed, the steering, the rotary tiller lifting, the rotary knife shaft stopping and so on, and through the test, it was found that the minimum turning radius was small, the average ground pressure was large, the gripping ability was strong, the rotary tillage depth was suitable and the stability was good.
Key words Crawler;Remote control;Rotary tiller;Design
由于果园种植为劳动密集型产业,国内对果园管理机械的研究起步较晚,机械化程度不高。河北省作为果园种植大省,近年随着城镇化的快速发展,农村劳动力的转移,导致农业生产用工成本越来越高,制约着该省果园产业的发展,急需发展机械化、智能化的果园管理机械[1-5]。该研究针对河北省果园发展现状和果园作业环境,研发一种履带自走式遥控旋耕机,其可配套开沟、施肥、起垄、回填、植保等功能部件,实现果园全生产链的机械化管理。
1 机具整体设计与组成部分
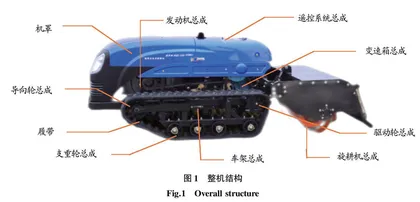
1GZDY-120履带自走式遥控旋耕机由底盘行走装置、动力传动系统、遥控操作系统、电控油门、液压动力系统、防撞装置等组成[6],整体结构如图1所示。
1.1 底盘及行走装置设计
底盘行走装置由车架、驱动轮、导向轮、支重轮、履带等组成。车架为车体整体车架,安装履带遥控式作业机的发动机、变速箱、蓄电池、液压站、动力输出装置等[7-11]。车架结构如图2所示。
驱动轮固定于车架的后上方,与变速箱连接,与导向轮横向水平,置于车架前端,车架的底端设有4组支重轮,用于支撑车体,履带环绕在驱动轮、导向轮上,由导向轮后的张紧装置调节履带的松紧。1GZDY-120履带自走式遥控旋耕机行走由变速箱传递动力至驱动轮,驱动轮驱动履带转动,导向轮引导车体行走方向,履带滚动前进,带动支重轮在履带上滚动,同时将车体重量分布在履带上。
1.2 动力及传动设计 1GZDY-120履带自走式遥控旋耕机动力来源于柴油机,柴油机动力通过V型三角带传至变速箱,由离合手柄控制离合带轮与变速箱的结合分离。设计动力经变速箱分两路传出:一部分为变速箱动力驱动单元,其是通过变速箱内的齿轮传动将动力传输至车体两侧驱动轮,驱动轮驱动履带转动,履带带动支重轮、导向轮在履带内滚动,实现车体行走,同时,变速箱手柄挂接不同档位,实现机组不同速度行进以及前进与后退的变换,停车则通过拉动离合手柄使离合带轮与变速箱分离实现;另一部分为变速箱动力后输出挂接单元,该作业机配套功能部件为旋耕装置,因此变速箱动力后输出口通过与旋耕机变速箱连接实现旋耕机刀轴旋转,旋耕机刀轴转、停通过离合装置控制。
1.3 遥控及操作设计
遥控履带自走式旋耕机是在机械操纵的基础上,采用先进的电子集成控制系统与机械操纵技术相结合[12-14]。遥控控制系统发射器采用型号F-23BBTX(图3),接收器采用型号F23-BBRX,接线方式如图4所示。
发射器采用点动方式按键,发动机油门大小、车体左右转向、旋耕机具升降、旋耕刀轴转停、离合器分合等均通过发射器点动按键实现,发射器还设有急停按钮,以便偶遇紧急状况时操作,发射器工作状态如长时间不需点动功能按键可点动按键锁定,发射器通电使用需先点动解锁按键。
遥控履带自走式旋耕机机械操纵部分设计为“工”字型操作档位,切换档位时需点动发射器上的“分”按键,接收器接收指令发送给液压控制系统,由液压推杆推动离合器分离,操纵杆手动切换到所需档位。
1.4 电控油门设计 1GZDY-120履带自走式遥控旋耕机采用SGCD10型电控油门装置,用于控制机具发动机油门大小装置,调节发动机转速,实现机具行走或作业过程中的加减速。其由电机、单片机、内置行程调节电位器、外接行程调节电位器、钢丝等组成。电控油门通过驱动内置电机旋转带动钢丝伸缩实现发动机油门的控制[12-15]。电动油门控制器接线方式如图5所示,其安装接线后对电控油门进行调试,确保升速信号和降速信号无效,接通电源,钢丝自动降到下限位置,把发动机的油门调节手柄调节到合适的怠速位置,将钢丝绳固定到发动机的油门调节手柄上。外接行程调节电位器调到最大位置,内置行程调节电位器调到较小位置,使升速信号有效,钢丝绳收缩,油门调节手柄慢慢拉至内置行程调节电位器设定的位置,调整内置行程调节电位器,直到油门调节手柄调到合适的高速位置,此时调整外接行程调节电位器,使油门手柄在下限位置和内置行程调节电位器设定的最大位置之间移动。使升速信号无效,降速信号有效,则油门手柄降到下限位置;使升速信号有效,油门手柄将移动到电位器设置的位置;如果升速信号与降速信号同时有效,将执行升速信号。
1.5 液压系统设计
1GZDY-120履带自走式遥控旋耕机液压系统由齿轮泵、电磁换向阀、油缸、油管、滤清器等元件组成,依靠液压系统的工作,实现配套功能部件的升降[16-17],其原理如图6所示,电磁换向阀工作原理如图7所示。
车辆在行驶过程中,按下遥控器左(右)按钮,接收器指示灯亮起。同时主控制阀、左转向阀指示灯亮起,接通左转向油缸油路,活塞杆伸出,推动左转向摇臂,带动左分离拨叉,分开变速箱内部末端主动齿轮,切断左边动力,机器实现转向。松开后,所有指示灯熄灭,油缸回位,末端主动齿轮结合,机器直线行走。停车时则接收器、主控制阀、左转向阀、右转向阀指示灯同时亮起、左右转向油缸同时伸出,推动左右转向摇臂同时分离,实现停车。
2 1GZDY-120履带自走式遥控旋耕机测试试验
2.1 试验条件
1GZDY-120履带自走式遥控旋耕机试验分最小转弯半径试验、平均接地压力试验、旋耕深度及稳定性试验3项内容进行[18-20]。试验于2021年6月21日在中国科学院栾城农业生态系统试验站进行,试验面积100 m×50 m,矩形,地块规整,土壤肥力中等,植被覆盖量2 550 g/m2,土壤坚实度6.9 kg/cm2,土壤含水率19.4%(0~10 cm土层)。
2.2 最小转弯半径试验
试验方法:将1GZDY-120履带自走式遥控作业机暂未挂接旋耕机,试验机开到空旷地面,操纵杆挂接 Ⅰ 档,油门为最小状态,在平齐机具前端和右侧划线,长按发射器(遥控器)上的“左”按键,机具转一整圈,测算转弯半径,试验重复5次,计算平均值。
由表1可知,1GZDY-120履带自走式遥控作业机最小转弯半径为1.800 m。
2.3 平均接地压力试验 平均接地压力试验是测定旋耕机重量和行走装置接地面积,其比值即为整机对土壤的平均接地压力。试验方法:1GZDY-120履带自走式遥控作业机挂接旋耕机,测定质量时,发动机加满油、水称重。在场地上测定履带的接地长度(第一支重轮中心到张紧轮中心垂线的水平距离)和宽度(履带宽度),计算面积。计算公式如下:
P=9.8Mb×l×10-3(1)
式中,P为平均接地压力(kPa);M为自走旋耕机整备质量(kg);b为机具两侧履带宽度之和(m);l为履带的接地长度(m)。
1GZDY-120履带自走式遥控旋耕机整备质量为730 kg(通过称重得知),每条履带宽度为0.230 m,左右2条履带总宽度为0.460 m,履带的接地长度为1.005 m,通过计算得平均接地压力为15.5 kPa。
2.4 旋耕深度及稳定性试验
2.4.1 旋耕深度试验方法。在测区内沿机组前进方向每隔2 m 左右两侧各测1个点,各测10次,计算耕深平均值。计算公式如下:
a=ni=1ain(2)
式中,a为耕深平均值(cm);ai为第i点的旋耕深度(cm);n为测定点数。
1GZDY-120履带自走式遥控旋耕机耕深试验数据见表2,数据代入公式(2)计算得旋耕深度平均值为12.1 cm。
2.4.2 耕深稳定性系数。
1GZDY-120履带自走式遥控旋耕机耕深稳定性系数计算方法:由表2耕深试验数据代入耕深标准差S计算公式(3),由公式(4)和公式(5)推算出耕深变异系数V为3.9%,耕深稳定性系数U为96.1%。
S=ni=1(ai-a)2n-1(3)
V=Sa×100(4)
U=1-V(5)
3 结论
该研究
研制了一种1GZDY-120履带自走式遥控旋耕机,该机集机械技术、电子集成控制技术和液压控制技术于一体。由发射器发送指令,接收器接收指令,实现对液压系统、机械传动等的控制,完成对1GZDY-120履带自走式遥控旋耕机行走(快、慢)、转向、旋耕机升降、旋耕刀轴转停的远程操作,减少农药和尘土对操作人员的危害,降低劳动强度。