工业机器人系统集成技术应用教学设计与实践
作者: 许怡赦 王玉方 许孔联
[摘 要] 针对工业机器人技术专业复合型技术技能人才需求及培养现状,以“工业机器人系统集成技术应用”课程为例,依托工业机器人系统集成技术应用平台,提出了教学目标,构建了由基础项目、综合项目和创新项目组成的分层次递进式训练项目。在教学过程中,通过模仿工程案例实施领会项目开发流程,采用角色扮演方式体验企业真实岗位,融入信息化教学手段以激发学生学习兴趣。经实践验证,课程改革提升了课堂趣味性,改善了教学效果,提高了学生的专业和工程素质。
[关键词] 工业机器人;教学设计;教学实践;人才培养
[基金项目] 2020年度湖南省哲学社会科学基金项目“基于智能制造教学工厂的高职智能制造技术专业群建设研究”(20YBA190)
[作者简介] 许怡赦(1975—),男,湖南岳阳人,博士,湖南网络工程职业学院网络技术系副教授,主要从事智能制造技术、机器人系统集成应用和复杂机械力学特性分析研究;王玉方(1985—),男,河南鹿邑人,硕士,湖南网络工程职业学院网络技术系讲师,主要从事工业机器人技术研究;许孔联(1980—),男,湖南郴州人,硕士,湖南网络工程职业学院网络技术系教授,主要从事智能制造技术研究。
[中图分类号] G642.0;TH165 [文献标识码] A [文章编号] 1674-9324(2022)34-0141-04 [收稿日期] 2021-09-10
针对日益增长的企业用工需求,全国开设工业机器人技术专业的高职院校在逐年增加,2014年、2015年、2016年分别为9所、45所、238所,2019年达到616所。与快速增加的学校数、学生数相比,各个院校该专业的办学水平参差不齐。国内大多数高职院校工业机器人技术专业的开设年限为1~2年,且偏重课堂教学,课程内容及设置还不成熟,与实践还有一定的差距[1];部分高职院校所开设的工业机器人实训课程仅着眼于工业机器人认知及在线示教编程或离线仿真编程[2-5],满足于工业机器人的基础实训;有些高职院校所开设的“工业机器人技术综合实训”课程则主要涉及不同功能的工业机器人工作站的认识、工具选择、气路电路设计、机器人程序编制、机器人与PLC通信等内容[6],缺少工业机器人工程应用相关的实训课程。为了满足企业对工业机器人技术专业复合型技术技能人才的需求,我校工业机器人技术专业较早开设了具有实践性、综合性和创新性特点的工业机器人系统集成技术应用课程,在第五学期鼓励学生综合利用大学一二年级所学相关理论知识,完成指定的工业机器人训练任务和平台改造任务,取得了较好的教学效果。
一、工业机器人系统集成技术应用平台介绍
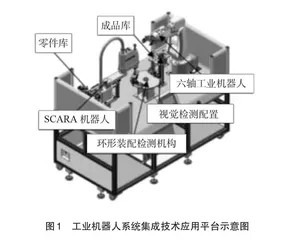
工业机器人系统集成技术应用平台由工作台、零件库、SCARA机器人、环形装配检测机构、六轴工业机器人、视觉检测装置、成品库、PLC和伺服驱动系统等组成(如图1所示)。零件库主要由储料台、安装支架、按钮底座、按钮盖、按钮指示灯等组成,为零件提供放置平台;SCARA机器人及其相关气动夹具和电气系统提供上料;环形装配检测机构主要由转盘、安装支架、气动夹具、步进电机、减速机、检测装置组成,主要负责接收来自SCARA机器人的散件,将散件运送到装配位置,同时将散件牢牢夹紧,防止在装配过程中散件移动;六轴工业机器人主要负责将环形装配检测机构上的散件装配成一个按钮,根据检测结果将按钮分类放到按钮成品库中;视觉检测装置主要由安装支架、摄像头、控制器、光源等组成,摄像头检测按钮装配质量及颜色,并将结果送至控制系统;成品库主要由储料台、安装支架组成,用于盛放已装配完成的按钮,根据颜色和质量进行分类仓储。
二、训练项目
按照教学目标,针对实训平台,设计由易到难三个训练项目,即基础项目、综合项目和创新项目(表1)。
(一)基础项目
基础项目主要是使学生了解环形装配检测机构、视觉系统、SCARA机器人和六轴工业机器人机械结构、电气原理,并进行编程与调试,强化学生动手能力锻炼,以及加深学生对机器人基础理论的理解。
1.环形装配检测机构编程与调试。该项目利用Can Link通信或者面板完成伺服驱动器参数配置,并与PLC进行Can Link通信;完成触摸屏编写、PLC控制程序编写与调试。通过上位机实现转盘的手动控制,即实现转盘正转点动、反转点动、0°位置和180°位置寻址、电动机位置清零、电动机去使能、电动机停止等功能操作。
2.视觉系统编程与调试。该项目调整相机镜头焦距及亮度,使智能相机稳定、清晰地摄取图像信号,在软件中能够实时清晰查看现场按钮灯图像;黄色按钮灯为学习,获取灯光颜色;将黄色按钮灯放置转盘180°处气爪上,手动拍照,在软件中能够显示该黄色灯的亮与灭,以验证相机学习的正确性。
3.SCARA机器人上料编程与调试。该项目对SCARA机器人运动轨迹与程序流程进行规划,并进行参数设置和示教编程,对按钮灯组件完成自动上料操作。
4.六轴工业机人装配编程与调试。该项目对六轴工业机器人运动轨迹与程序流程进行规划,并进行参数设置和示教编程,对按钮灯组件完成组装和入库操作。
(二)综合项目
该项目综合了基础项目,实现了按钮灯自动装配与分拣。动作流程为:SCARA机器人从原料库中抓取对应的红色、黄色或蓝色按钮盖和灯座组成部件,并将按钮盖和灯座组成部件放置在环形装配检测机构的固定位置;然后环形装配检测机构旋转180°,到达六轴机器人的装配检测工位,六轴机器人进行按钮盖组装;组装完成后,供电机构给按钮灯送电,同时通过视觉相机进行检测并判断按钮灯颜色;视觉检测完毕,供电机构停止送电,六轴机器人根据视觉相机的数据对按钮灯进行分类,然后通过六轴机器人将按钮灯搬入成品库指定位置。学生经过SCARA机器人、六轴工业机器人、视觉系统及环形装配检测机构的编程,系统组态和联网调试等技术细节,强化学生对系统的综合装调能力。
(三)创新项目
对图1所示平台的零件库、成品库、机器人末端夹具及转盘的机械、电气进行改造,模拟某公司多品种物料转运码垛智能工作站需要,实现七巧板分拣与拼接(图2)。动作流程为:SCARA机器人从原料库图2(a)中抓取对应大小的红色或黑色、三角板和正方形七巧板,并将按七巧板放置在环形装配检测机构的固定位置;然后环形装配检测机构旋转180°,到达六轴机器人的下料工位,六轴机器人通过视觉相机进行检测并判断七巧板颜色;视觉检测完毕,六轴机器人根据视觉相机的数据对七巧板进行分类,然后通过六轴机器人将七巧板搬入图2(b)指定位置。根据公司生产改造任务,学生自行进行机械三维造型、系统布局和控制方案设计等,考查学生机械、电气和控制技术背景综合能力及创新开发能力,使学生既了解行业背景,又要会设计、成本计算和装调,具备工程实践能力,学到真本事。
三、工业机器人系统集成技术应用教学实施
(一)课前准备
教师在课前需要提前3天发布任务书、学习引导手册,并发布相关的微课视频、项目参考案例库、机器人说明书等主要技术手册。学生在收到教师下发的任务书后,根据学习引导手册进行预习,了解任务要求,提前预习相关知识点。
(二)任务导入
教师引入蓝思科技长沙经开区产业园招工难进行任务,引导学生讨论企业大规模自动化改造升级,尤其是工业机器人大规模应用,进而引入七巧板自动分拣与拼接项目开发与应用的实用性和必要性,激发学生的学习兴趣。
(三)任务分析
学生根据任务书要求进行分析。组长根据任务进行人员分工并设计工作流程,分析工作过程中需要应用的技术与专业软件、需要计算的材料与成本,以及系统方案的设计思路等,并撰写项目的可行性报告。
(四)任务实施
基于真实的工业机器人系统集成项目进行任务实施。教师扮演客户角色,学生则按前述的要求扮演项目经理、设计员、安装调试员、质检员等,通过客户与项目组的沟通和督促等,促进学生的学习和进度监控。
(五)任务评价
要求每组制作PPT进行分组汇报,教师进行客观公正的点评,同时进行小组互评。教师要对每组的工作亮点提出表扬,对不足之处进行指正;其他组成员对汇报组进行打分评价,小组间可以互相学习,取长补短。
四、教学效果
在工业机器人系统集成技术应用课程中,基础项目强化了学生对工业机器人和PLC的基础编程技能,学生掌握程度较好;综合项目考查了学生对工业机器人系统集成技术的应用综合能力,对理论知识的理解和逻辑思维能力要求较高,大多学生难以完成,在教学过程中需要教师进行详细的讲解;创新项目是对现有平台的改造,更是对学生创新开发能力和工程实践能力的考验,以小组分工的形式模拟完成公司员工的任务,不仅能学习专业课程知识,而且能了解工作岗位的实际情况和工程的实际状态,做到学以致用,有助于学生在调研资料、设计方案、组内交流过程中扩展知识面,学会分析问题和解决问题,培养团队意识。
结语
本文探索了具有实践性、综合性和创新性特点的工业机器人系统集成技术应用教学设计与实践,主要目的是培养学生的工业机器人系统集成理论知识、专业技能、职业能力和创新素养。
参考文献
[1]张佳,陈杰,窦丽华.基于路径规划的智能机器人控制实验[J].实验技术与管理,2010,27(12):44-47.
[2]赵玉侠,狄杰建,高德文,等.MOTOMAN工业机器人在焊接条件下的示教编程与实验研究[J].实验室研究与探索,2010,29(9):59-63.
[3]胡洪钧,谢立敏,梁晓,等.工业机器人实验项目开发与实践[J].实验技术与管理,2015,32(9):201-204.
[4]印松,唐矫燕.工业机器人综合训练平台[J].实验室研究与探索,2016,35(2):55-58.
[5]丁健,郭琼,胡俊平.高职《工业机器人安装与调试》课程建设与探索[J].教育教学论坛,2019(2):262-264.
[6]胡洪钧,谢立敏,梁晓,等.工业机器人实验项目开发与实践[J].实验技术与管理,2015,32(9):201-204.
Teaching Design and Practice of “Application of Industrial Robot System Integration Technology”
XU Yi-she, WANG Yu-fang, XU Kong-lian
(Department of Network Technology, Hunan Network Engineering Vocational College, Changsha, Hunan 410004, China)
Abstract: In view of the demand and training status of compound technical talents in the major of industrial robot technology, taking the course of “Application of Industrial Robot System Integration Technology” as an example, relying on the application platform of industrial robot system integration technology, this paper puts forward the teaching objectives, and constructs a hierarchical and progressive training project composed of basic projects, integrated projects and innovative projects. In the teaching process, students can understand the project development process by imitating the implementation of engineering cases, experience the real positions of enterprises by role-playing, and integrate information-based teaching methods to stimulate students’ interest in learning. Practice has proved that the curriculum reform has improved the interest of the classroom, the teaching effect, and the professional and engineering quality of students.
Key words: industrial robot; teaching design; teaching practice; talent training