机电系统网络控制课程的多维度混合式教学探索与实践
作者: 杨丽曼 沈东凯 石岩
摘 要:针对研究生课程机电系统网络控制的教学现状与发展需求,开展多维度混合式教学探索与实践。构建包含课堂讲授、资源库、专题研讨等在内的线上线下多维度教学体系;针对主题研讨实践环节引入翻转课堂,以项目驱动和研讨式教学引导学生分组完成课程相关的项目任务,掌握并运用所学知识分析解决问题,体验科学研究的过程与思维方法,形成理论知识到科研实践的闭环训练;最终建立形成性和终结性相结合的多元考核评价体系,旨在通过课程学习培养专业基础扎实、科研素养和工程实践能力突出的高端创新型人才。
关键词:多维度混合式教学;翻转课堂;项目驱动教学;多元考核体系;机电系统网络控制
中图分类号:G642 文献标志码:A 文章编号:2096-000X(2024)02-0115-04
Abstract: In response to the current teaching situation and development needs of the postgraduate course Network Control of Electromechanical Systems, a multi-dimensional hybrid teaching reform is explored. A multi-dimensional online and offline teaching system including classroom lectures, resource library and seminars has been built. For the practical part of the thematic seminar, a flipped classroom is introduced. Project-driven and seminar-based teaching guides students to complete course-related project tasks in groups. Students will be able to analyze and apply their knowledge to solve problems and experience the process and thinking methods of scientific research, forming a closed-loop training from theoretical knowledge to scientific research practice. A multi-dimensional assessment system combining formative and summative elements was eventually established, aiming to cultivate high-end innovative talents with solid professional foundation, outstanding scientific research literacy and engineering practice ability through the course study.
Keywords: multi-dimensional hybrid teaching; flipped classroom; project-driven teaching; multiple assessment system; Network Control of Electromechanical Systems
习近平总书记在全国教育大会上指出,教育是国之大计、党之大计[1]。我国要建设世界科技强国,关键是要建设一支规模宏大、结构合理、素质优良的创新人才队伍,激发各类人才的创新活力和潜能。国内外高水平大学的实践表明,将现代科技的最新成果融入课堂教学,引导学生参加科研训练,以科教融合为途径促进理论知识的融会贯通和学以致用,对于培养学生的工程实践能力和科研创新思维作用显著[2-3]。与此同时,互联网、大数据等技术的飞速发展和移动智能互联网设备的普及,极大地扩展了教学资源和教学手段,传统单一的课堂教学模式已经不能满足新形势下的教育需求。因此,探索一种线上线下相结合、多种教学手段相结合的多元混合式教学模式对于推动新工科背景下培养理论基础扎实、工程实践能力强的高端创新人才具有重要意义[4-5]。
本文以所授的研究生课程机电系统网络控制为载体,进行多元混合式教学模式的探索与实践。机电系统网络控制是一门面向机电类与信息类研究生的专业技术理论课,围绕网络通信与机电控制系统的交叉融合应用,阐述其基本问题、系统设计方法和典型应用中的关键技术[6]。本课程具有理论性和实践性紧密结合、多学科交叉和紧跟科技前沿等特点。通过学习本课程,促使学生理解机电系统网络控制的概念、特点和基本问题,掌握其设计分析方法,以及在航空航天、工程机械、智能交通和智能制造等工程应用中的关键技术,并关注和探讨其热点研究方向,通过完成研讨项目和交流展示,进一步消化吸收所学的理论知识,学以致用,解决实际问题,提升工程实践与创新能力。
本文在科教融合视域下,以培养学生的科研创新思维和工程实践能力为目标,从教学组织形式、教学手段和考核方式等不同角度出发,探索教学改革的具体实践方法。首先针对以往教学中存在的问题进行分析,之后提出了采用线上线下结合和翻转课堂的教学改革方案,以实例分享来阐述具体教学思路和实施方法,最后从基础知识和研讨实践两大环节的紧密结合构建了多元考核体系,改革后的教学模式具有强化基础、突出实践和科教融通的特色。
一 教学问题分析
本课程从2015年开课以来,已完整地讲授了六轮次,并进行了持续改进,学生对教学效果的评价整体良好,但也存在一些问题,归纳如下。
基础知识部分。基本概念较抽象,理论性强,缺少相关案例支撑,与工程实际有一定的脱节,学生反馈较难理解,也与后面的前沿热点研讨教学缺少过渡过程。
热点研究方向的研讨与项目实践环节。由于内容较为新颖,同时涉及网络规划与机电系统设计以及具体应用领域的交叉融合,需要学生完成方案设计与仿真验证分析等工作,尚未经过科研项目锻炼的同学感到学习难度较大。
考核方面。目前对学生成绩的评定主要依据平时成绩(课堂签到、作业等)和最终提交的报告,对课堂反馈、小组成员协作、展示互动等过程环节的关注度不足,一定程度上影响学生的积极性和主动性,也不利于对学生基础知识、概念,以及实践能力、创新能力等综合能力的考查。
二 教学模式探索与实践
本课程涉及到通信网络、机电系统和控制理论等多个学科,信息量大、专业性强,对于接触科研项目较少的研一学生来说难度更大。因此,考虑采取线上线下相结合的多维度教学,引入翻转课堂来强化学生课堂主体,对于增强教学效果具有重要作用。
(一) 线上线下结合的多维度教学
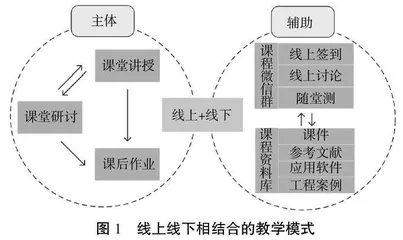
随着互联网的发展,移动终端的普及与网络资源的日益丰富,学校的课程平台和社会公共服务平台都为多元化和多维度教学提供了有效支撑[7-8]。本课程充分利用了课程中心、微信群和多媒体教室等资源构建了如图1所示的线上与线下教育相结合的多维度教学模式,形成了以课堂讲授-研讨-课后作业为主体的线下教学,以及课程中心的教学资源库与课堂微信群的线上辅助教学,充分发挥了各自的优势。
作为教学主体,线下的课堂讲授和课堂研讨是知识传授的主要方式,课件对于教学效果的影响至关重要。在课件设计中,尝试将图像、动画、视频等多种基本视觉元素进行综合,融入生动活泼的过程演示和视频讲解,针对案例教学结合具体的应用背景和前沿成果,将产品、方案、实验等与对应的知识模块关联,从而形成多媒体、多形态、多层次的教学资源,达到提高学生学习兴趣、增加展示信息量,以及拉近学生与科技前沿距离的目的。
针对研究生课程知识面宽广、注重探索创新的特点,本课程在课程中心建立了包含课件、参考文献、应用软件和视频在内的资源库并及时更新,帮助学生更简便地获取课程资料以及开阔视野,特别是针对每一知识模块的关联应用案例给出了原理演示和仿真代码,引导学生理论联系实践,跟踪科技前沿动态,为后面的研讨实践环节打好基础。同时,利用微信课程群进行随堂测试和线上讨论,鼓励学生遇到问题及时与教师联系,加强师生互动,形成对课堂授课的有效补充。
(二) 翻转课堂
翻转课堂的基本思路为将传统的学习过程翻转过来,让学习者在课外时间完成针对知识点和概念的自主学习,课堂则变成教师与学生之间互动的场所,主要用于解答疑惑、汇报讨论,从而达到更好的教学效果[9-10]。根据本课程的培养目标,将研究热点领域划分为若干研讨主题并设计任务,引入翻转课堂开展项目研究实践,实施流程如图2所示。课堂上对各主题的项目任务进行讲解,学生分组选定主题后,在课下通过互联网、各种媒体资源和书籍等查阅资料,从题目的分层设计、项目训练教学、研讨教学等多角度考虑,鼓励学生分组协作,围绕着机电网络控制系统领域的核心技术、典型应用与仿真分析三个方面展开,层层递进,进行选题研讨、方案设计、实验验证等工作,并以小组轮讲形式在课堂上汇报和交流,完成理论知识与方法的吸收、扩展和应用。
以往届学生的多机器人协同项目为例,翻转课堂的小组工作流程如图3所示。该项目的任务是模拟3个机器人以隐式的协作方式协调作业。首先,小组学生围绕多机器人系统进行文献综述,重点归纳多机器人协作的关键技术和相关典型案例的实现方法。接着,围绕任务目标讨论整体技术方案,确定系统拓扑结构,在建模与任务解析基础上设计机器人间的网络通信方案和调度策略,以及每个机器人的状态方程和控制律。之后,基于MATLAB-TRUETIME平台搭建仿真模型,进行仿真测试并分析结果。最后,整理各环节工作内容,制作演示文稿在课堂进行展示和讨论,并对项目所关联的课程内容进行知识复盘和拓展,课程结束后根据老师和同学们的提问建议来完善课程报告。在整个过程中,学生对于群体体系结构、感知、通信、协调协作机制和性能评价等知识有了更加深入的理解,特别是如何对一个实际系统进行网络规划与调度有了切实体会,通过搭建模型和仿真分析对所设计的解决方案与具体算法加以验证和改进,形成了从理论到实践的有效闭环。
在这一环节中,任务驱动式教学方法[11-12]和研讨式教学[13-14]配合使用,学生成为课堂主体,教师以引导、答疑和组织为辅助,通过案例关联和研讨互动,将抽象的理论知识具体化并学以致用,促使学生以工程的观点看待问题和解决问题,在设计、验证和改进项目解决方案的过程中,真正体会到自主科学研究的方法和思路,极大地激发了学生对科研探索的热情和潜能。同时项目组内的研讨协作、小组间的互动和课堂上的汇报展示让大家认识到团队协作与沟通交流的重要性,并在实践中得到了锻炼和提升。
经过两轮次的教学改革实践,我们发现丰富的教学资源库和线上线下多维度教学为研究生课程提供了知识传授的新途径,而翻转课堂与任务驱动教学和研讨教学相结合,引导学生体会自主科学研究的思想方法,是提升教学质量与激发学生探索精神的有效手段。
三 多元考核体系的探索与实践
考核是督促学生不断进步的一种手段,更是教师检验教学效果的一种有效方式。以往对于学生成绩的评定,主要采取课程报告和课堂展示效果评价,造成学生仅关注结果,而不注重研究思考的过程。对标世界一流大学的育人理念,真正使学生将科学研究的思想融入到学习中,有必要对学生的学习效果采取多方位的评定[15-16]。