结合机器人应用的现代控制理论课程教学改革研究
作者: 刘爽
基金项目:国家自然科学基金面上项目“薄壁复杂曲面表面超声滚压强化及双侧协调控制研究”(51975214)
作者简介:刘爽(1982-),男,汉族,吉林长春人,博士,副教授。研究方向为抗疲劳制造与机器人技术。
DOI:10.19980/j.CN23-1593/G4.2024.06.032
摘 要:现代控制理论课程对于机电控制方向特别是机器人研究方向的研究生而言,是必须学习的一门课程。然而,对于大部分机械专业的研究生来说,该课程理论难度较高,并且课程联系实际应用较差。该文根据作者多年教学经验,概括高校中的现代控制理论课程特点,结合自身机器人研究方向基础,从教材、教学内容、实验配套、教学模式、考核方式等方面明确现有课程的不足,并提出相应的具体改革对策,为非自动化专业的现代控制理论课程建设提供参考和应用实践。
关键词:现代控制理论;机器人技术;教学改革;教学内容;教学模式
中图分类号:G642 文献标志码:A 文章编号:2096-000X(2024)06-0136-04
Abstract: The course of Modern Control Theory is a required course for graduate students in electromechanical control, especially in robot research. However, for most graduate students majoring in machinery, this course is difficult in theory and poor in practical application. Based on the author's years of teaching experience, this paper summarizes the characteristics of the modern control theory course in colleges and universities, and clarifies the shortcomings of the existing courses from the aspects of teaching materials, teaching content, experimental support, teaching mode, assessment methods, etc., and puts forward corresponding specific reform countermeasures with considering the robotic applications. This work aims to provide reference and application practice for the construction of Modern Control Theory courses in non-automation majors.
Keywords: Modern Control Theory; robotics; teaching reform; teaching content; teaching mode
现代控制理论课程是高等院校机械专业研究生的核心学位课程,也是机电类研究方向的基础[1-2]。由于机械学院中大多数研究方向对控制理论的要求不高,因此,研究生培养方案中一般只将现代控制理论课程列为选修课。该课程本身理论性较强,存在大量的数学公式推导,实践应用部分普遍使用倒立摆的平衡控制这一实例,对学生而言过于枯燥[3]。因此,选课积极性普遍不高,教学效果与成绩也较难控制。但该课程的重要性不言而喻,特别是很多机电专业的研究生在从事机器人技术这类综合性研究方向时,如果没有选修该课程,将会非常吃力[4]。
作者有着多年的现代控制理论课程教学经验,也教授了多年本科的控制工程基础与微机原理及应用课程,对机械专业中该课程的教学特点与教学对象非常熟悉。作者结合自身关于机器人研究的方向,思考如何融合机器人应用案例,提高该课程的工程实践性,增强学生学习积极性,对现代控制理论课程的内容、教学方法和考核方式等方面进行改革研究。
一 现代控制理论课程的现状与特点
(一) 机械专业中的现代控制理论课程
机械专业培养方案中的现代控制理论课程一般与自动化专业中的不同,比如作者所在高校中机械专业的现代控制理论课程是一门32学分的选修课,而自动化专业中则为64学时必修课,这在许多高校也是普遍现象。该课程虽然是选修课程,但属于硕士学位的核心课,该类别课程必须修满6个学分,并且作为核心课必须要求考试。由于该课程理论性较强,考试难度大,因此,选修该课程的研究生一类是学生的研究方向与控制相关,比如机器人技术、机电控制、设备监测等方向,另一类是由于其他核心课程无法满足学分要求,或为了满足升学考博要求[5-6]。因此,针对机械专业的现代控制理论课程选修,应尽量简化繁琐的理论推导,重视结论的应用与实践,提高学生自主学习积极性和扩展课程内容。
(二) 课程的内容特点
现代控制理论课程的内容主要分为状态空间模型、系统分析、系统综合和最优控制几个部分[7]。但是由于学时限制,机械专业中教学大纲通常会将最优化控制部分进行缩减,并省略部分离散系统的内容,同时简化或省略一些较复杂的定理推导。在整个教学过程中,课程除了绪论部分提供了较多应用案例外,其他章节大多遵循“理论-推导-结论-MATLAB仿真”的教学模式。为了丰富教学与联系实际应用,多数课程都在MATLAB仿真中穿插了倒立摆的案例[8],也有一些高校配套了课程实验,大部分自动化专业的现代控制理论课程内容较多,需要更多的课时,而机械专业的课程则应该适当减少内容来平衡课时限制的影响。
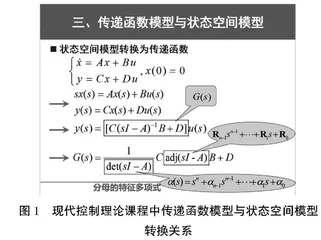
总体上,该课程有着理论性强、公式抽象难懂、涉及面广等特点,对学生而言是较难学习的一门课程。此外,该课程对控制基础与线性代数基础的依赖性非常高[9],传递函数模型与状态空间模型之间的转换关系如图1所示。在该知识点的讲授中,直接对传递函数进行了矩阵操作,这就默认学生在本科阶段对自动控制原理和线性代数掌握较好。但事实上,根据作者多年的教学经验体会,学生们的基础参差不齐,特别是涉及诸如约当矩阵这类概念时,大部分学生更是没有掌握的,这和本科阶段的线性代数教学大纲有关。这就意味着在教学中需要穿插补充一些基础知识复习,以便学生对基本定理公式的理解,这对教师教学进度与学时的把控能力提出了挑战。
图1 现代控制理论课程中传递函数模型与状态空间模型
转换关系
(三) 课程对象的特点
在自动化专业的研究生培养方案中有很多与现代控制理论相关的课程,比如,最优控制理论和自适应控制课程等,形成了一个控制理论的学习体系,然而,对机械专业的研究生而言,现代控制理论课程是非常独立的一门课程,很难形成关联效应,学习起来会非常困难。此外,现代控制理论课程是学生本科阶段控制工程基础或自动控制原理课程的一个后续课程,而机械专业的本科生有相当比例在后续的培养方案中并没有涉及任何控制相关的研究问题,这就造成在课程学习时,机械专业学生的基础明显较弱的现象。
就作者所在机械学院的现代控制理论课程选课学生来看,主要是机械工程和动力工程专业学生选修,其中约有一半研究生的本科就来自本校的机设或过程专业,都学习过控制工程基础(必修),大部分掌握程度满足本课程学习要求。另一半研究生的本科来自其他高校,其中部分学生本科阶段没有必修自动控制原理课程或基础较差。而对于线性代数基础,学生们普遍忘却较多。因此,研究生培养方案中,在第1、2学期都设计了矩阵理论的课程,以辅助其他课程的教学,这在一定程度上弥补了这一缺陷。
根据作者对学院中各个团队的研究方向了解,对现代控制理论需求较高的方向主要集中在机电自动化领域上,特别是与机器人技术与应用相关的方向。因此,该团队的研究生学习热情较高,而从事机械制造、检测监测或流体控制的研究生也会学习该课程,但机械材料与寿命预测的学生选课的目的大多数是为了满足学分要求。这些学生的差异在进行MATLAB仿真教学以及小组实验讨论时会特别明显,需要区别对待。
二 教学内容的改革
(一) 进行教材改进
现有的现代控制理论课程教材通常是自动化专业教师编写的,并用于自动化专业的必修课程教学,通常教材内容较详细,重视理论逻辑与公式推导[10],一些教材辅助以MATLAB案例与程序,所以篇幅普遍较长。市面上较少有针对非自动化专业研究生或偏应用型的教材,考虑到机械专业研究生选修该课程的主要原因是工程应用且课时较短,因此,应该编写针对性强的偏应用型教材。由于现代控制理论的学习需要较好的工程数学基础知识,因此,补充相应的矩阵理论知识有助于学生对课程内容的理解。此外,应该适当降低教材难度,减少篇幅,简略其中的公式推导过程。为增强课程的实际应用性和学生的能力培养,可以选择更有代表性的应用案例,替代原有的倒立摆案例,并辅助以实验配套。
(二) 优化教学内容
在教学内容上,由于控制工程基础为现代控制理论的前序课程,也是机械专业本科的必修课,因此,采用对比教学,可增强学生对控制理论的理解,并了解现代控制理论的优势和学习必要性。
为了增强现代控制理论课程的实际工程应用性,应选择更有代表性的工程案例,穿插在整个教学过程中。本文作者根据自身机器人研究基础与多年教学经验,不断尝试将两轮差动移动机器人的控制作为典型案例,代替现有的平衡倒立摆案例。移动机器人的控制在现代社会中有广泛应用,比如酒店、餐厅、银行、医院的服务机器人基本都是两轮差动机器人,而自动驾驶和核心控制也与移动机器人控制方法类似,这将大大增加案例的实际应用性,提高学生兴趣。
具体地,可以在各个章节中以移动机器人的控制为例,从状态空间模型建模、系统分析、系统综合和最优控制几个方面来优化教学内容。比如,①在状态空间建模中,以两轮差动移动机器人运动模型为例,推导其状态空间模型,其特点是将两轮轮速控制推导为机器人中心点的平面移动与转动控制,建立移动机器人控制的状态空间表达式;②同时,可对比全向移动机器人与差动移动机器人在状态空间模型中的区别,具体分析轮速的两个控制量在控制平面三个自由度时的能控性;③可以通过两个轮子转速进行机器人状态估计,以两轮的编码器得到的速度作为典型观测器来分析机器人的能观性;④在系统综合中,可以讲解经典的差动机器人轨迹跟踪控制方法,如back stepping方法,对跟踪控制器的稳定性进行分析,调节其中状态变量并分析其对稳定性的影响;⑤在控制器设计中,则可利用李雅普诺夫稳定性分析方法设计一个非线性控制器,保证轨迹跟踪误差收敛,加深学生对机器人控制器设计过程的理解。以差动移动机器人的控制为案例穿插到教学内容中,这样的教学改动不仅可以大幅增加课程联系实际应用性,还与目前主流的机电领域发展相一致,为相关研究生的课题研究提供基础,增加学生学习积极性。
(三) 辅助实验内容
传统教材大多以MATLAB仿真进行案例辅助教学。MATLAB具有现代控制理论的基本公式计算功能,而且相关函数可以直接进行状态空间模型建立、能控和能观性分析,以及稳定性的计算与判断,可以简化实际应用时繁琐的公式计算与推导。这在一定程度上降低了课程学习的枯燥与单调性,增加了理论公式的可实用性,但所使用的案例大多数是倒立摆[11],虽然对象简单案例成熟,但很难让学生联系实际应用。
结合作者对机械专业研究方向与学生兴趣的了解,学生普遍对机器人和人工智能等新兴概念感兴趣,特别是越来越多的各式各样的服务机器人出现在日常生活当中,比如餐厅送餐机器人、酒店的服务机器人、银行的业务辅助机器人以及在防疫工作中出现的消毒与药品配送机器人等。因此,采用移动机器人为案例对象,可以增加案例的实用性和学生兴趣。为此,可以配合教材的改进,增加课程的实验内容,补充目前机器人研发主流的机器人操作系统ROS的基础知识扩展。利用ROS系统的三维物理仿真平台GAZEBO和三维可视化工具RVIZ构建移动机器人联合仿真环境,也可以搭配turtlebot机器人实物实验演示,如图2所示。