新工科背景下“1+X”教学方法研究
作者: 高春艳 吕晓玲 田颖 刘璇 李满宏
摘 要:在新工科背景下,高等教育需要不断创新教学方法,以适应时代的发展和人才培养的需求。通过对智能机器人技术课程教学现状的分析,详细阐述基于“1+X”教学方法的具体实施步骤和对学生的影响,研究和探索该方法在课程教学实践中对学生的理论知识、实践能力、工程意识的成效。同时探讨该方法对高等教育教学改革和创新的启示,对于在新工科背景下开展高质量教学具有一定的参考价值。
关键词:新工科;智能机器人技术;“1+X”教学方法;教学改革;探索实践
中图分类号:G642 文献标志码:A 文章编号:2096-000X(2024)29-0132-04
Abstract: In the context of new engineering, higher education needs to constantly innovate teaching methods to adapt to the development of the times and the needs of talent cultivation. By analyzing the current teaching situation of the course Intelligent Robot Technology, this paper elaborates in detail on the specific implementation steps of the "1+X" teaching method and its impact on students, and studies and explores the effectiveness of this method in improving students' theoretical knowledge, practical ability, and engineering awareness in course teaching practice. At the same time, the inspiration of this method for higher education teaching reform and innovation was explored, which has certain reference value for carrying out high-quality teaching in the context of new engineering.
Keywords: new engineering; Intelligent Robot Technology; "1+X" teaching method; teaching reform; exploring practice
基金项目:2019年度天津市一流课程建设项目“机器人技术及应用”(6);2022年度河北省研究生教育教学改革研究项目“多维度思政融合的课程教学改革与实践——以《机电和控制课程群》为例”(YJG2023022);2021年度河北工业大学教育教学改革研究与实践项目“特种机器人技术主动融入本科教学新型模式探索与实践”(18);2021年度河北工业大学校级教育教学改革研究项目“融合课程思政的《工程图学实践》课程教学模式改革与探索”(17)
第一作者简介:高春艳(1979-),女,汉族,河北衡水人,工学博士,副教授。研究方向为特种机器人技术。
随着科技的不断发展和应用,机器人技术已经成为了现代工业和服务业的重要组成部分。智能机器人技术课程的教学愈加重要,而在新工科背景下,教学方法的变革已经成为了必要的举措[1]。目前,我国高等工程教育领域的机器人技术应用规模庞大,但其质量仍存在一定问题。主要体现在以下几方面:学生整体能力不足,缺乏工程实践能力和技术创新能力,难以满足新经济发展对工程技术人才的需求。与此同时,中国作为全球最大的机器人应用市场,机器人整机和关键零部件与国外同类产品性能差距明显,急需培育大量能把握机器人研发、制造、应用、维护及治理等的专业复合型人才。虽然国内各高校开展了针对新工科专业的各种改革和探究,但大多局限于“校企合作”类组织形式上,而且多数未能进行教学内容的整合[2-3]。大多数高校依然采用固定的课程教学方法,以课堂讲授、实践教学、闭卷考试为主,导致学生无法对学习形成有效持续推进,对专业兴趣日趋平淡[4-5]。
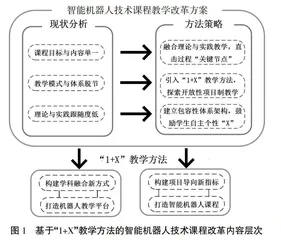
新工科教育注重跨学科融合、产教融合、创新创业,强调培养具有综合素质和实践能力的高素质人才,因此,智能机器人技术的教学方法改革也必须与之相适应。“1+X”教学方法是一种符合新工科教育理念的教学模式,它将学科核心课程和跨学科拓展课程有机结合,旨在促进学生的跨学科思维和综合能力的培养。本文以智能机器人技术课程为例,探讨在新工科背景下“1+X”教学方法的研究与应用,变革层次如图1所示。
一 智能机器人技术课程教学现状分析
在新工科背景下,智能机器人技术课程教学内容涵盖机器人的机械结构、电子控制、人工智能等多个方面,旨在培养学生掌握机器人的基本理论、设计、制造、控制和应用技术。在教学过程中普遍存在一些不足之处,具体如下。
(一) 课程目标与内容单一
智能机器人技术课程的目标是为学生提供关于机器人和人工智能技术的基础知识和实践技能,以便学生能够设计、制造、控制各种类型的智能机器人。新工科背景下机器人工程专业的课程需要紧密结合现实需求,对传统机器人技术进行优化和升级。课程内容应该涵盖机器人视觉、人工智能、机器学习等新兴技术,培养学生的综合素质,使其能够胜任未来机器人领域的各种工作。尽管这门课程所涉及的内容非常广泛,包括机器人的构成、运动控制、感知技术、智能技术和应用技术等方面,但是它的目标并不是让学生深入掌握每一个细节和技术,而是帮助他们获得对机器人和人工智能技术的整体认识和理解,以便能够在今后的学习和实践中更好地发展和应用。同时,新工科背景下机器人工程专业的课程需要促进跨学科融合,与其他学科进行交叉合作。比如,与计算机科学、机械工程、材料科学等学科合作,进行跨学科教学和研究,培养学生的综合素质和创新能力。
(二) 教学模式与体系脱节
智能机器人技术是一个快速发展的领域,需要不断更新和改进教学模式和体系来适应最新的技术发展,提高教学内容的综合性和行业实践的联系。当前的教学模式和体系存在以下问题。
教学模式过于理论化。当前智能机器人技术的教学过于侧重于理论知识的传授,而缺乏实际操作和应用的培养。这种教学模式不能满足实际的应用需求,导致学生在实际操作中缺乏经验和技能,智能机器人技术需要学生具备一定的实际操作技能,否则很难将理论知识转化为实际应用。
教学体系缺乏行业实践。教学体系与行业实践缺乏紧密的联系,导致学生缺乏对行业的了解和认识。智能机器人技术需要紧密结合行业实践,让学生深入了解实际的应用场景和需求,才能够更好地应对未来的挑战。通过课程设置和实践环节,帮助学生了解行业发展动态和趋势,提供各种实习和就业机会,培养学生的创新和实践能力,提高其职业竞争力。
(三) 理论与实践跟随度低
理论与实践跟随度低主要体现在教材更新不及时、实践条件不足与课程设置缺乏针对性三个方面。由于很多学校或机构没有足够的资金和资源来为学生提供足够的实践机会,导致课程实践与实际应用脱节,所以学校或机构可以通过与企业合作、申请科研项目等方式来提供更多的实践机会。其次,智能机器人技术课程的设置往往比较宽泛,缺乏针对性,难以满足不同学生的需求。学校或机构可以根据学生需求和兴趣设置不同层次、不同方向的课程,提供更加个性化和专业化的教学内容。同时,学校或机构还可以通过与企业合作,提供实践机会,让学生更好地了解实际应用需求。
二 融合“1+X”教学方法的智能机器人技术课程改革策略
针对智能机器人技术课程的教学改革,我们可以考虑采用融合“1+X”教学方法的策略。这种教学方法将传统课堂教学与实践教学相结合,可以更好地培养学生的综合素质。具体而言,我们可以从以下几个方面进行改革。
(一) 融合理论与实践教学,直击过程“关键节点”
在传统的教学模式中,理论教学和实践教学往往是分离的。然而,在智能机器人技术这门课程中,理论知识和实践操作是密不可分的。因此,在课程设计中,我们应该将理论知识和实践操作相结合,实现理论与实践的融合。
对于学习及教育的目标,不同方面的看法与期望往往差距巨大:教师关心知识、学生关心毕业、学校关注排名和社会希望公众素质提高,产业界则希望毕业生从校门到企业实现零差距,但是这些期望的核心均指向了“能力培养”。高校工程教育的关注焦点应逐渐转移到学生与产业界的密切结合上,以确保毕业生能够满足职业需求,成为具备创新能力的合格工程师。综合分析各方面期望,其共性目标在于提升学生的综合能力。若能通过硕士研究生阶段教学切实打通“应用”这一关键节点,必将会从不同对应点实现需求适应,使学生成长为有创新力的合格工程师,对标工程应用能力培养目标,整合课程及项目设计、实践等内容,着力打通从理论知识到工程实践的关键环节。
具体而言,我们可以采用如下措施,可以让学生更好地掌握知识,提高实践能力。
结合机器人的构成、工作原理、控制技术等理论知识,使学生在实际操作机器人时更好地理解其原理和技术。
邀请相关企业或机构的专业人士来课堂上分享实践经验,让学生了解行业动态和机器人技术的应用领域,以激发学生对学习的兴趣。
(二) 引入“1+X”教学方法,探索开放性项目制教学
“1+X”教学方法是指,在传授基础知识点的同时,再加上多个扩展知识点的教学方法。在智能机器人技术这门课程中,我们可以采用这种方法,来让学生更全面地了解机器人技术。
纵观当今社会对硕士人才的需求,不仅包含对学生理解及推理能力、工程模型构建能力、实验及分析能力、不同技术方案筛选能力和对不同工程应用的适应能力等诸方面要求,更深层次的是学生主动获取专业知识的能力,以及与他人交流专业知识的能力。核心是应用与交流,基础是专业技能。因此,依托科研及工程分解出相应单元,设置机器人创新项目,以设计拉动加工理论学习,以系统调试拉动力学分析及仿真,通过项目实施和教学引导,全面覆盖培养要求的所有能力,如图2所示。其中开展各类专题讲座,例如“机器人智能控制”“机器人多感知技术”“机器人设计与开发”等,结合“齐次变换与运动学建模实验”“机器人位姿测量与计算实验”“机器人运动规划仿真实验”等实验,开展学生的学习方法、实验方法与创新方法的交流学习。同时,通过在工业设计及机械电子工程专业近三个学期的试点应用,学生进入特种机器人实践短期工作后均有显著成果产出。例如,对于智能机器人技术可以加上多个扩展知识点,例如,机器人运动学与动力学、机器人控制、机器人感知、机器人运动规划等等。这样做的好处是能够让学生更全面地了解智能机器人技术的各个方面,而不仅仅是局限于某一方面的基础知识。
(三) 建立包容性体系架构,鼓励学生自主个性“X”
教学团队为硕士研究生提供弹性包容的知识模块教学,鼓励学生根据兴趣探索个人的“X”项技能技巧。通过理论与实践、课堂与现场的相互结合,为智能多元化的学生群体创造出弹性适应的学习情境。将课程定位在专业知识、专业技能、专业能力上,团队教师作为各项教学活动的组织者与协调者,通过将工程应用渗透到教学内容中,可以实现知识信息的快速拓展,并且构建立体的知识结构。同时,传统的教学评价方式往往以考试和作业为主,忽略了学生的实践能力和创新能力。在智能机器人技术这门课程中,应该采用多元化的评价方式,全面考察学生的能力。
例如,可以采用如下评价方式。
设计和完成机器人项目,评估学生的实践能力和创新能力。
考察学生的编程能力,例如通过编写机器人程序的方式进行评价。
采用小组讨论、报告、演示等方式进行评价,考察学生的表达能力和团队合作能力。
方法实施过程通过鼓励并引导学生带着自己的思考、灵感、知识与经验参与到教学活动之中,并积极寻求个人成长,找到自己的附加“X”要素,如图3所示。在前期试点应用中,同学分化出的学习目标包括工程测试方法与技术、传感器技术及分析、工业控制理论及实施和质量管理及控制等。通过对机器人工程专业方案的顶层设计,抓住一条主线,即基础理论教学,通过基础知识、专业基础知识学习打牢基础理论;X主线即进行全面、深入、系统化的移动机器人系统设计,采用一贯制的新模式来推动实践教学和培养创新能力。通过融合“1+X”的课程体系架构,打通理论教学和实践教学环节,构建课程教学新模式。
三 结束语
在新工科背景下,高等教育需要不断创新教学方法,以适应时代的发展和人才培养的需求。以智能机器人技术课程为例,探索了基于“1+X”教学方法的课程研究。在此基础上,打通理论教学和实践教学环节,借助智能机器人技术课程,采用多元化的评价方式,全面考察学生的能力,构建融合“1+X”教学方法的项目教学系统,逐步持续强化学生的工程意识,更好地提高学生的学习兴趣和学习效果,培养更多的机器人技术人才。
参考文献:
[1] 李瑞峰,荣伟彬,邓鑫.新工科背景下机器人工程专业研究与探索[J].中国大学教学,2020(Z1):32-36.
[2] 乔国朝,张争艳,张建辉,等.新工科背景下机械专业人才培养模式改革与实践[J].高教学刊,2020(21):85-88.
[3] 张辉,李智勇,钟杭,等.“智能机器人技术”课程教学改革实践[J].电气电子教学学报,2023,45(1):4-6.
[4] 任斌.机器人控制技术课程教学改革的探索与实践[J].高教学刊,2021,7(21):126-129.
[5] 许晓艳.“1+X”证书制度下高职院校智能控制技术专业课程改革——以机器人视觉系统技术课程为例[J].信息系统工程,2022(9):165-168.