面向工程硕士的“机器人技术”课程教学改革探索
作者: 韩亚丽 高海涛 欧益宝 关鸿耀
[摘 要] 针对工程硕士的培养需求,从南京工程学院机械工程类应用型研究生的实际出发,进行了“机器人技术”课程的教学改革研究,在教学内容中融入工程案例分析,在教学方法中采用翻转课堂,在课程实施中贯彻实训实践,使课程在提高工程硕士的实践应用能力及创新能力上发挥重要作用。课程教学是研究生培养中的重要环节,为了提高工程硕士的实践能力,在课程教学中进行教学改革探索研究,旨在加强理论教学与应用实践相结合,培养学生解决实际问题的能力。
[关键词] 机器人技术;课程内容构建;案例教学;项目化实践教学
[基金项目] 2021年度江苏省高等教育教改立项研究课题“五链融合驱动的机械专业开放性教学,个性化学习培养模式研究与实践”(2021JSJG208);2021年度南京工程学院教学改革与建设项目“面向工程教育专业认证的机械电子工程专业建设持续改进研究与实践”(JXJS2021004);2022年度南京工程学院研究生课程建设项目“机器人学”(2022YXKC01,2022JC02);2022年度南京工程学院研究生教材建设项目“机器人技术应用与实训”(2022JC02)
[作者简介] 韩亚丽(1978—),女,河南驻马店人,博士,南京工程学院机械工程学院教授,主要从事仿生机器人技术及智能控制,工程教育核心内涵与工程能力培养方式方法研究。
[中图分类号] G643 [文献标识码] A [文章编号] 1674-9324(2025)12-0071-04 [收稿日期] 2023-11-23
工程硕士旨在培养学生的工程实践能力[1-3],而实践能力的训练和提升需要从课程设置、专业实践、校内外导师等各个环节进行研究[4-6]。近年来,随着工程硕士的扩招,而高校工程实践教学的软件和硬件资源无法及时补充,导致必需的工程实践环节被削弱,同时相当一部分工科教师尤其是具有高学位的年轻导师缺乏必要的工程背景,加上校外企业实习效果无法保证,这使得培养的工程硕士人才大多数属于知识型而非工程型,与行业企业的实际岗位需求存在明显差距[7-10]。
一、课程面临的主要问题
1.课程教学内容更新较慢。传统“机器人技术”课程的教学内容更新较慢,硕士生“机器人技术”课程应更重视课程的高阶性,不仅要学习机器人技术的核心知识,还要兼顾机器人的前沿技术以及一些专精特新技术等。新的工程学科下的机器人课程可将知识边界拓展到工业机器人之外的其他机器人理论与技术,给出新的知识边界。
2.实践能力欠缺。目前在机器人实践教学环节,多采用教学专用机器人实验仪器,优点是模块化程度高、方便教学,但存在很大局限性,设备成本高,实践场地狭小,无法满足课程需求,学生得不到充分的锻炼,教学效果不够理想。
3.教学评价单一。传统硕士生“机器人技术”课程的教学评价单一,主要为平时和期末大作业成绩,学习中仅仅完成了低阶的知识目标,缺乏课程高阶性的合理评价方法,课程外拓展及发散模式不够清晰,导致学生对课程缺乏参与热情,无法满足应用型工程硕士教育的需求。
综合分析目前“机器人技术”课程存在的问题,并结合学校办学定位和对工程硕士的培养需求,开展面向工程硕士的“机器人技术”课程教学改革。
二、课程改革的主要指导思想
南京工程学院对工程硕士的培养有清晰定位,由于与世界一流高校差距明显,在培养研究生从事高端科学研究工作能力方面存在差距,但也不能只着眼于培养技工,故要思考如何紧跟国家发展前景更好地培养复合应用型人才。基于我校工程硕士的培养定位,进行“机器人技术”课程的教学改革与建设,具体思路如下。
1.进行教学内容研究,注重机器人基础知识与控制技术相结合,结合实际案例,通过技术实操,使学生能自行编写简单的机器人程序,培养学生的技术创新和工程实践能力。
2.进行教学方法的研究,优化课程内容,使其内容丰富、新颖。注重案例教学,结合机器人教学样机,进行系统讲解,使得学生对机器人产品有更形象和具体的认知。
3.进行实践教学方法改革研究,将教学实践重点放在研究性实践的开发上,在实践教学环节中,教师只是协助引导和组织实践工作,要求学生发挥主观能动性和学习的积极性,在实践环节自行搭建硬件平台,控制机器人完成指定的动作。机器人实践过程中所需的实验平台管理采用半开放式,除了白天教学时间,晚上也对学生开放,以解决实验设备数量少、学生使用冲突的问题,使得学生的实践机会增加,有助于提高学生解决实际问题的能力,为后续研究生课题的研究打下基础。
三、课程改革的具体内容
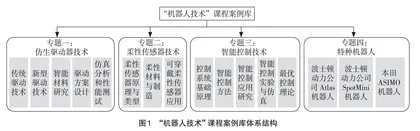
1.教学中融入案例化分析。根据机器人技术教学大纲,进行教学案例和技术模块的筛选,并进行教学案例素材的收集及案例库的建设。“机器人技术”课程案例库体系结构如图1所示。
在进行案例建设中,以信息化技术为依托,进行课件的制作。例如,在仿生驱动技术案例中,录制传统驱动器在企业实际应用中的视频,在新型仿生驱动技术中,用三维建模软件、仿真软件开展新型驱动器的设计及性能特征的仿真分析,通过虚实结合的教学案例,加深学生对相关技术的理解。
在进行案例建设中,紧跟机器人前沿技术。通过视频了解其发展过程,对近年来最新机器人进行技术剖析,分析其仿生机构与驱动设计、自主导航、智能感知、运动规划与控制技术,旨在实现学生对机器人前沿技术的有效感知与掌握。
2.课堂翻转以学生为中心。不同于本科生课程学习中注重知识能力的培养,在硕士生课程学习中,应侧重自主学习能力的培养,尤其是独立解决问题能力的培养,故要充分发挥学生的积极主动性,以学生为中心进行翻转课堂的教学方法改革。
在进行翻转课堂实施中,聚焦机器人研究热点,随着老龄化的加剧,面向老人的各种服务机器人成为近年来的主要研究对象,以医疗康复机器人为例,进行机器人关键技术的分析及研讨。在课前布置任务,学生围绕主体内容进行分组、检索、讨论、制作PPT,并在课堂上分组汇报,教师与学生进行讨论互动并总结。
3.项目化教学提高学生实践能力。在课程中融入实训环节,采用以产出为导向的机器人技术项目化教学,旨在提高学生的应用能力及创新能力。“机器人技术”课程开设的项目化实训教学依托本校校企协同育人工程实训平台中的越疆机器人系统。在实施中,按照自由组合、专业方向互补的原则进行实训分组,每组4~5人。实训教学实施借助信息化手段,通过线上与线下混合教学方式,实现课前环节预习、课中环节实践、课后环节总结,实现学生深刻参与项目中,并得到锻炼与提升。
实训中需要学生基于越疆Dobot桌面机器人实现物块的分拣搬运工作任务,机器人实训平台如图2所示。
在实施过程中,每组要进行协作编程完成机器人运动规划及控制。其具体控制流程为:首先,进行平台各模块的初始化设置,完成后,通过USB线连接电脑上位机程序与机械臂电机控制平台,来实现上位机程序控制机械臂的分拣搬运控制,并进行待搬运物体的初始位置坐标以及抓取存放区域坐标的确立,以便进行后续机械臂的准确抓取。其次,机械臂将通过吸盘进行物块的抓取,并将其放在指定的存放区域。最后,视觉传感模块检测到后将进行位置与颜色的区分,以进行后续的分拣与搬运。
4.课程改革实施效果评价。进行课程改革的综合评价,形成课程教学的闭环,实现持续改进。课程的改革效果需要从多个方面进行评价才能最直观、最准确地了解改革在哪些方面有进步。对学生进行问卷调查研究,针对本校2022级选修“机器人技术”课程的85名学生开展问卷调查,覆盖对“机器人技术”课程教学内容是否满意、实践教学的开展形式、实践教学内容如何设置以及对课程改革的建议等。调查问卷的统计结果如图3和表1所示。
由图3和表1可看出,学生对课程教学方式及教学内容的认可度较高,课程对学习兴趣的产生及学习动机的培养很有帮助,对拓宽学术视野及专业知识的储备有较好帮助,课程中融入讨论课及实践教学环节非常有必要,对实践教学环节中教师讲解与学生操作的时间比例建议为1∶1,并对课程的考核方式建议为平时成绩(20%)、大作业成绩(40%)与实践课成绩(40%)的综合计算的方式。问卷调查为课程改革的持续推进提供了较好的研究基础。
结语
研究生教育是高等教育的重要组成部分,随着我国制造业的飞速发展,全社会对于高层次应用型工程人才的需求越来越旺盛。此外,目前我国正处于经济转型和“机器换人”的时代,机器人产业将会得到快速发展,“机器人技术”课程作为我校研究生专业课程的核心课程,对其进行改革具有重要的意义。
1.进行面向工程硕士培养的“机器人技术”课程的教学内容改革。在传统机器人知识上,融入案例教学,在进行案例库建设的过程中要注意知识的高阶性及内容的前沿性,以此确保案例教学在“机器人技术”课程中的高质量。结合目前机器人的研究热点,进行机器人关键技术的深度剖析,培养学生思考并解决问题的能力,为后续的研究生课题打下研究基础。
2.进行面向工程硕士培养的“机器人技术”课程的教学方法改革。不同于常规课程中“填鸭式”教学模式,在课程中融入翻转课堂的教学模式,以学生为中心开展讨论,最后教师进行点评分析。在此过程中,培养学生团队协作、分析问题、工程应用及创新的能力。
3.进行面向工程硕士培养的“机器人技术”课程的实践教学改革。结合学校培养应用型人才目标,在课程中增设实训环节。基于学校的桌面机器人实训平台,开展机械臂的分拣搬运控制实训项目。学生应用所学的机器人基础知识,基于视觉技术,通过机械臂协同运动控制算法、避障算法等上位机程序编写,完成机械臂对不同颜色块的分拣及搬运。在此训练过程中,真实模拟学生遇到实际问题并针对问题寻找解决方案的场景,提升学生的实践应用能力。
参考文献
[1]黄焱球,李珍,李飞,等.工程硕士研究生课程案例教学法初探[J].高教学刊,2020(3):107-109.
[2]张近民,王颖,高斌.体现工程教育理念的机器人实践教学[J].大学教育,2019(8):8-10.
[3]刘瑾,魏继红,祁长青,等.工程硕士研究生培养中应用案例课程研究[J].高等建筑教育,2021,30(5):61-67.
[4]张珂.机械学科研究生应用型创新实训课程改革[J].实验技术与管理,2019,36(5):242-245.
[5]温秀平,解乃军,陈巍,等.基于项目化教学的专业学位研究生实践创新类课程建设新思路:以越野机器人项目化训练课程为例[J].中国现代教育装备,2021(9):118-121.
[6]刘小波.《工业机器人基础》课程内容构建与教学实践[J].教育现代化,2018,5(40):157-161.
[7]张建国,季甜甜.基于产学研结合的应用型研究生培养研究[J].大学教育,2021(1):174-176.
[8]吴斌,刘英,杨雨图,等.面向应用型研究生培养的《现代机械制造技术与装备》课程案例库的建设[J].机械设计与制造工程,2017,46(12):117-120.
[9]王顺宏,李邦杰,李杰,等.项目驱动式教学模式在研究生课程中的应用与实践[J].教育教学论坛,2021(6):165-168.
[10]王珍,张文卓,关乐,等.新工科背景下地方高校机械工程硕士课程建设探索[J].教育教学论坛,2022(11):105-108.
Reform on Teaching Reform of Robotics Course for Master’s Degree Students in Engineering
HAN Ya-li, GAO Hai-tao, OU Yi-bao, GUAN Hong-yao
(School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing, Jiangsu 211167, China)