人形机器人100 YEARS
作者: 陶紫东PHASE 1
1920年代末
人形机器人初现
人形机器人首次走出二维幻想,成为三维实体,具备初步“类人”形态,但功能简单。
原型机 跨越二维 具象化人形概念
1920年代 至 2020 年代
Eeditor's note
1 9 2 0年,捷克作家卡雷尔·恰佩克(K a r e lapek)在其科幻戏剧《罗素姆万能机器人》的剧本创作中首次使用“robot”一词。剧中,robot是被批量制造、服务于人类的类人机器,后因觉醒而反抗人类—robot源自捷克语robota,后者的含义为苦力、强制劳动或奴役。
恰佩克的剧本不仅是robot这个词的起源,更预言了机器人伦理与人类社会的矛盾。自此,人类关于创造类己智能体的执念有了专用名称。
在中文里,机器人一词在语法上属偏正结构,词意的落点在“人”,实际的表达核心却是机器—不是像机器一样的人,而是像人一样的机器。这导致如果想确切表达概念,往往还要加上“人形”这个前缀。
这种纠结,贯穿了人类对人形机器人100年的探索历程:既希望它越来越接近人类,又多少有点恐惧它越来越接近人类;努力赋予它思考能力,又害怕它真正拥有了不受人类控制的思考能力。
进入2020年代,基于大模型的深度学习技术为人形机器人产业打开了新的想象空间,该领域的融资额在2023年同比增长240%,这不仅是技术革命,更是人类自我投射的集体消费。
《列子·汤问》记载,周穆王看过工匠制作的能歌善舞的“能倡者”的表演之后发出一句感叹,时至今日它仍然极具讨论价值。周穆王问的是,
1927
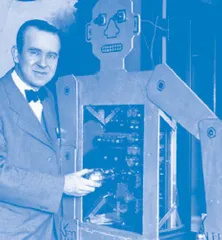
美国西屋电气推出“Televox”
可远程控制电器的早期人形装置。
1928

英国人William Richards和AlanReffell发明“Eric”
能站立、坐下,具人形轮廓。
1929
日本人西村诚开发“学天则”
可变换面部表情,会写日文,第一个东洋机器人。

PHASE 2
1970年代至1990年代
技术启蒙与高校研究
以高校和政府实验室为核心,人形机器人进入“感知—控制—运动”的系统性研究,初步具备“行为”。
大学主 感知控制 基础搭
1973

早稻田大学推出“WABOT-1”
全球首台具有基本感知与控制能力的人形机器人。这是第一个能够行走、与日本人交流(用人造嘴)、使用外部受体(人造耳和眼睛)测量与物体的距离和方向,以及用手抓取和运输物体的机器人。
1984
早稻田大学推出“WABOT-2”
能够看懂乐谱,并演奏风琴。

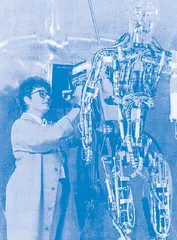
1989
Manny
美国太平洋西北实验室为美国陆军试验场开发的具有42个自由度的全尺寸拟人机器人。它不能自己走路,但可以爬行,并且有一个人工呼吸系统来模拟呼吸和出汗。12名研究人员花3年时间和200万美元开发了这个机器人。
1996
本田P2
本田制造了一个用电池供电的机器人,它可以像人一样走路,甚至可以上下楼梯。它看起来像一个穿着宇航服的宇航员,高约6英尺(约合1.83米),重约460磅(约合209千克)。本田花了10年时间开发这款机器人,并于1996年12月20日在东京推出。

2000
本田发布“ASIMO”
能行走、跑步、上下楼梯。2018年本田“ASIMO”退役停产意味着“表演型机器人”的阶段性终结。
2000

先行者
中国第一台双足类人机器人,由中国国防科技大学于2000年创造。先行者身高1 4 0 厘米,体重2 0千克,能以每秒两步的速度行走。
PHASE 3
1990年代至2010年代
工业巨头试水与轻应用
企业投入,机器人形象更“亲民”,但多以表演与展示为主,缺乏实用功能。
企业试 表演化 轻娱乐应用
2003

索尼发布“QRIO”
能够跳舞、识别人脸并与人互动。
2000年代初


富士通“HOAP”、近藤“KHR”系列出现

2006
法国初创公司Aldebaran发布“NAO”具有自主性和可编程性。

2008
德国航空航天中心(DLR)开发“Justin”系列
可以抓取飞行物体、制作咖啡,主要用途是支持宇航员在太空中的任务,如卫星维修和太空站维护。
2008
Nexi
被《时代》杂志评为年度最佳发明之一,由麻省理工学院媒体实验室开发。Nexi可以在轮子上移动,并且可以捡起物体。但它最引人注目的特征是那张像人一样的脸可以表达出一系列令人震惊的情绪。2010年代
PHASE 4
2010年代至2020年代
从服务型转向人机交互
服务机器人兴起,开始向“人机情感交互”发展,表演机器人让位于“有用机器人”。
AI融合 情感交流 商业化雏
2010
Robonaut
位于德克萨斯州休斯敦的NASA林登·约翰逊航天中心(JSC)的灵巧机器人实验室开发的项目,是20 11年2月24日成功发射的发现号航天飞机有效载荷的一部分。Robonaut与当前其他太空机器人的不同之处在于,当时的太空机器人系统(如机械臂、起重机和探测漫游者)都是为移动大型物体而设计的,但Robonaut的任务需要更多灵巧性。

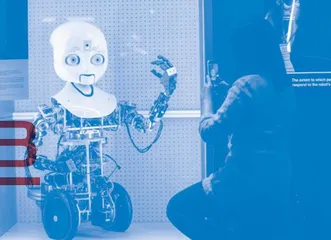
2013
Poppy
第一个开源的3D打印的人形机器人,由法国国立计算机及自动化研究院推出。
2014
软银推出“Pepper”
强调“情感交流”。

2015
Vstone推出“Sota”
小型陪伴机器人,能简单对话和通过表情互动。
2016
夏普发布“RoBoHoN”
结合手机功能的机器人,具备语音交互能力。
2016
