果园植保仿形喷雾技术研究现状与展望
作者: 张惠 姜春淼 张景 陈金成 潘峰
摘要 果园植保作业机械化、智能化发展有力助推了果园经济效益的提升。其中,以树冠仿形喷雾为代表的果园精准植保技术,能够提高药液喷施精度与果树受药效果,实现减药增效,相关技术装备研发已成为当前热点。首先,对目前国内外冠层仿形机构展开综述,分别介绍并对比分析了倒U型、变喷杆与双摇臂式仿形机构的工作原理和特点;其次,介绍了采用上述仿形机构研制出的智能化植保作业机具;最后,指出制约当前智能化植保机械技术发展的关键问题,并对进一步推进研发、应用进程提出建议。
关键词 植保机械;精准喷雾;仿形机构;力学分析;农机与农艺
中图分类号 S22 文献标识码 A
文章编号 0517-6611(2023)04-0006-06
doi:10.3969/j.issn.0517-6611.2023.04.002
Research Status and Prospect of Profile Spray Technology for Orchard Plant Protection
ZHANG Hui1,JIANG Chun-miao2,ZHANG Jing1 et al
(1.Mechanical Equipment Institute of Xinjiang Academy of Agricultural Reclamation Sciences,Shihezi,Xinjiang 832000;2.College of Mechanical and Electrical Engineering,Shihezi University,Shihezi,Xinjiang 832000)
Abstract The development of mechanization and intelligence of plant protection in orchard has greatly promoted the improvement of economic benefits of orchard.Among them,precise plant protection technology in orchard represented by crown biomimetic spray can improve spraying precision of liquid medicine and effect of fruit trees to reduce pesticides and increase efficiency.Research and development of relevant technical equipment has become a current hot spot.Firstly,this paper summarizes the current domestic and international crown profiling mechanisms,introduces and compares the working principles and characteristics of “inverted U-shaped”,“variable spray bar” and “double rocker arm” profiling mechanisms respectively. Subsequently,the intelligent plant protection working machine developed by the above imitation mechanism is introduced.Finally,the key problems that restrict the development of current intelligent plant protection machinery technology are pointed out,and suggestions are put forward for further promotion of R&D and application process.
Key words Plant protection machinery;Precision spray;Profile mechanism;Mechanical analysis;Agricultural machinery and agronomy
我国果园种植面积和水果产量常年稳居世界首位,水果已成为我国继粮食和蔬菜之后的第三大农业种植产业[1]。果园田间生产作业主要包括整地、中耕除草、开沟施肥、灌溉、植保、修剪、采收等多个环节,过程烦琐、用工需求大[2-3]。其中,植保作业作为防治病虫害、调节长势的重要环节,不仅劳动强度大,操作者还要面临有毒作业环境,其解放人力、实现机械化的需求更显迫切。尤其,随着我国城市化进程的加快,农村劳动力愈发紧缺,推进植保作业机械化、自动化已成为实现果园生产节本增效的必然要求[2,4-9]。
喷雾装备是实现果园植保机械化的重要载体,一般由机架、喷杆、喷头、药箱、动力系统等部分组成。近年来,随着精准喷雾技术的发展,喷雾装备逐步向自动化、智能化迭代升级[10-11]。尤其,为提升雾滴分布质量,越来越多的喷雾机械配置了仿形机构及其控制系统,即通过人工观测或传感器探测树冠形状尺寸,手动或自动调整喷杆折叠位姿实现对树冠均匀包络,从而均匀、稳定喷雾距离及药液分布,改善喷雾效果[12-14]。发展仿形喷雾技术对于实现精准施药,提高农药利用率、降低果园生产成本与环境污染具有重要意义。
该研究对国内外目前存在的果树冠层仿形机构进行综述,分别描述以倒U型、双摇臂式、变喷杆式为主的仿形机构特点,介绍具有上述仿形机构的植保作业整机,同时进一步分析树冠仿形机械当前存在的问题,并对树冠仿形技术的发展予以展望。
1 树冠仿形机构及分析
1.1 倒U型仿形机构
倒U型仿形机构由多个连杆铰接而成,其形状与倒“U”相似,该仿形机构在同一平面内有多个旋转自由度,各连杆之间角度变化范围相对较小、仿形精度较高[15]。
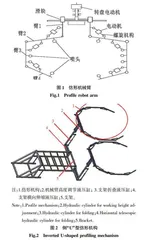
张建瓴等[16]首次提出果树仿形喷雾技术,设计出的对称仿形机械臂如图1,各机械臂前后铰接,相邻两机械臂之间通过直流电动机驱动螺旋机构改变仿形机构形状,滑块调节机械臂宽幅,转盘电动机驱动机械臂绕果树180°旋转。通过建立运动方程,计算了在平面内各喷头的工作可达空间,作业空间的数值仿真结果表明基本能完成树冠仿形运动,但上述结论只建立在仿真分析基础上,未得到试验验证。
遇宝俊[17]基于以上研究,在支架与仿形机构上做了较大改进(图2)。改进后的喷雾机可同时对两行果树作业,仿形机构平面自由度较高,水平间距与竖直高度可调,可满足不同形状、行距、高度的果园作业要求。采用ADAMS对其设计的倒“U”型仿形机构进行了动力学及力学参数分析,校验了其仿形机构的作业空间以及各铰链点在运动过程中的受力情况,仿真分析结果与样机试验结果基本吻合,满足其作业空间及强度的设计要求,实际喷雾作业效果未得到验证,且该仿形机构体积较为庞大,没有收缩机构,不方便运输。
尹翔宇[18]针对此机构设计出了一套基于LabVIEW与单片机的控制系统,以完成对仿形机构的运动控制。但该控制系统只以台架试验验证了其可行性,树冠信号采集问题与在真实作业环境中传感器的干扰问题仍有待解决。
霍鹏[19]设计了一种多段式可折叠仿形喷杆施药装置,该装置各段喷杆前后铰接,可实现折叠、展开和伸缩动作,该装置特点为便于运输存放,质量较轻。并且建立了多段式折叠仿形喷杆动力学模型,分析其动力学特性,求得该装置的关键部件的力学特性曲线及关键几何参数,将参数代入ADAMS与ANSYS分别进行动力学、静力学分析,校验了结构设计的合理性与可行性,通过试验对该装置的运动过程进行验证,结果表明该机构能平稳完成仿形运动。
1.2 变喷杆式仿形机构
变喷杆式仿形机构变形范围较大,该机构可以在“一”字型、“U”型、倒“U”型3种状态之间任意转换,“一”字型状态可适用于大田作物,“U”型与倒“U”型可适用于果园、景观树等多种场景,具有一机多用的特点[20]。
张慧春等[21]发明了一种仿形机械臂(图3),该机械臂由3部分组成,包括1个主臂和2个侧臂,均为中空管结构。主臂与两侧臂铰接,通过液压缸调节其夹角在0~90°变化,使得机构在“一”字型与倒“U”型之间进行转换,主臂两侧与侧臂下端均可通过内置电动推杆伸长,实现对不同树冠形状、不同作物的仿形。
李振生[22]基于虚拟样机技术设计了一种可以在喷杆式与隧道式之间相互转换的机构,如图4(a)所示,在中喷杆上设置衔架并安装气缸,侧杆通过气缸伸缩完成变角动作,将左右喷杆错位设计,不仅运输方便,还可使喷杆在非工作状态可沿轴向缩小而减小占用空间。徐幼林等[20]对设计喷杆转换机构的起降运动与变角运动进行了分析,通过建立机构起降、变角运动的运动方程,得到了原动件的角速度与其他构件间的位置、速度、加速度关系,建立机构在静力平衡状态下与原动件关于时间的函数关系,得到该装置的动力学方程并求解,用ADAMS动力学仿真求得机构特征位置的位移、速度、力与力矩特性曲线,其结果与动力学方程求解结果基本吻合,验证了动力学模型的正确性。
随学仕[23]在此机械结构做出改进,如图4(b)所示,将原来用于调节喷杆高度的升降机构换成了由单个液压缸驱动的平行四边形机构,这一改进不仅使喷杆在升降过程中保持竖直状态,还避免了喷杆的前后摆动。此外,侧杆变角部分改为了由液压驱动的曲柄摇杆机构,使得侧杆由原来0~90°角度变化扩大到0~180°,实现喷杆3种状态(喷杆式、隧道式、正U型)之间的切换。原喷杆左右伸缩机构改为了由液压缸驱动的折叠机构,使得运输状态与工作状态之间的切换更加稳定快速。
张疼[24]设计了一种集喷杆式、隧道式、仿形式于一体的多功能喷杆机构(图5),该装置具有结构轻便、便于运输、一机多用的特点。水平移动液压缸通过右端伸缩改变两门架的水平距离;电动推杆Ⅱ调节喷杆上下旋转完成隧道式与仿形式的切换;电动推杆Ⅰ调节门架两端的推杆实现隧道式与喷杆式的切换;电动推杆Ⅲ调节门架绕竖直轴向的转动以实现喷雾机运输状态与工作状态的变换。该样机的田间试验结果表明,仿形式、隧道式、喷杆式叶面与叶背的药液附着率分别为 60.5%与38.9%、52.2%与37.8%、63.6%与43.6%。在开启气流辅助系统时,雾滴沉积量分别提高了32.1%、26.5%、13.7%。
1.3 双摇臂式仿形机构 双摇臂式仿形机构则是一种对果树单侧进行仿形的机构,工作时,该机构位于两行果树之间,左右两侧的机械臂分别对行道两侧的果树进行仿形。
李明等[25]设计了一种电动遥控仿形机构(图6)。其上、下导向块与4根支撑杆组成四边活动摇杆机构。下导向块固定在机架上,上导向块与齿条焊接,通过控制电机正反转,带动齿条上下运动,从而带动上导向块上下运动,实现四边活动摇杆机构的开合控制,从而实现仿形功能。该仿形机构喷杆形状变化较为单一,无法完成不同树冠的准确仿形。
李杰[26]设计的风送式仿形喷雾机(图7),通过调节喷杆角度与风机送风角度联合实现仿形喷雾,该装置将喷杆置于风机之前,喷杆上的液压缸用于调节喷杆状态可实现果树顶部的仿形,进一步通过控制电缸的伸缩改变风机的送风角度以改变喷雾方向,并通过正交试验得到了风机的最佳送风参数为送风风速11.78 m/s、送风角度30°、送风距离25 mm,样机试验表明增加送风系统使得雾滴穿透性最大提升了55.8%,叶片正面沉积量最大提升60.2%,试制样机后的试验结果与仿真结果基本吻合。