产教融合的“智能驾驶导论”课程建设和改革
作者: 陈白帆 谢斌 王春生
[摘 要] 针对“智能驾驶导论”课程尚没有成熟的教学内容体系和满足培养需求的实践设计等问题,提出了基于产教融合的“智能驾驶导论”课程建设思路并进行了探索和实施。从教学目标和教学内容设置、教学组织、实践环节设计和实施方面引导企业深度参与,完成了基于智能驾驶产业需求的课程建设和改革,解决了课程与产业需求脱节的问题,使学生从产业和技术的视角构建智能驾驶的知识体系,同时培养了学生的工程实践和创新创业能力,为校企协同的课程建设和人才培养提供了很好的探索和实践。
[关键词] 产教融合;智能驾驶导论;校企协同
[基金项目] 2021年度中南大学教育教学改革研究项目“智能驾驶导论课程的建设与改革”(2021jy041);2020年度湖南省新工科研究与实践项目“面向新兴产业需求的大自动化类多元主体协同育人机制模式探索与实践”(湘教通〔2020〕90号)
[作者简介] 陈白帆(1979—),女(苗族),湖南常德人,工学博士,中南大学自动化学院副教授,主要从事智能机器人、智能网联汽车研究;谢 斌(1983—),男,湖南双牌人,工学博士,中南大学自动化学院副教授,主要从事智能机器人、无人驾驶研究;王春生(1966—),男,河南禹州人,工学博士,中南大学自动化学院教授(通信作者),主要从事智能控制与人工智能应用。
[中图分类号] G642.0 [文献标识码] A [文章编号] 1674-9324(2024)21-0053-04 [收稿日期] 2023-03-24
引言
智能驾驶是指机器帮助人进行驾驶,以及在特殊情况下完全取代人驾驶的技术。智能驾驶是一门新兴技术,将大大提升生产效率和交通效率,并有可能成为人工智能首先突破的领域。2020年,国家发展改革委、中央网信办、科技部等联合印发《智能汽车创新发展战略》,提出深化产教融合协同培养创新型中青年科技人才、工程技术人才、高级技工和管理人才[1]。“智能驾驶导论”系湖南湘江人工智能学院中南大学基地开设的专业课程。湖南湘江人工智能学院重点和特色体现在利用各高校优势学科基础设定适应于产业发展需求的人才培养方案,以及充分发挥政府产业公共平台和相关企业的场地、设备、师资优势,合作共建人才培养实训基地,为产业发展提供智力、人才要素支撑[2]。
“智能驾驶导论”课程纳入了智能科学基础系列精品课程群[3],由中南大学自动化学院的“智能科学基础系列课程”国家级教学团队进行建设和实践。以培养“实操能力强、综合素养高”的人工智能专业人才为目标,面向智能驾驶产业的需求,课程组着力开展“智能驾驶导论”课程的建设与教学改革,引导企业深度参与,从教学内容设置、教学组织形式的更新、校企协同等方面进行课程的改革与创新,重点培养学生的人工智能创新思维和创业能力,实现与产业的无缝衔接。
一、现状分析及待解决的问题
智能驾驶是一门新兴的技术,尽管已经逐步形成了一套稳定的理论和技术体系,但尚没有成熟的教材和教学内容体系,因此国内外鲜有高校开设这门课程。最早,仅有部分培训机构,如Udacity、百度等[4],开设了“无人驾驶”课程。然而其课程设置不够全面,仅仅体现了无人驾驶中的部分技术,并且由于面向的人群不固定,因此课程内容往往比较浅显。此外,对于“智能驾驶导论”这一新设课程来说,更是没有一个成熟的实践体系,缺乏适合该课程培养需求的实践设计等问题。这些问题严重制约了智能驾驶相关课程在高校中的顺利实施和推进。目前,北京理工大学、重庆工商大学等高校开设的智能驾驶相关课程利用MATLAB自动驾驶工具箱以及ROS开源系统实施课程实践,取得了良好的效果[5-7]。然而,在精准面向产业需求、充分开展校企协同育人方面仍有待完善。
二、“智能驾驶导论”课程的探索与实践
“智能驾驶导论”课程的建设与改革,要以智能网联汽车产业作为应用方向,探索人工智能人才的课程教学内容和教学模式,拟解决的关键问题包括:适应智能网联汽车行业需求的教学目标和教学内容设计、培养锻炼学生的动手能力和综合能力的课堂教学模式、提升学生对行业的适应能力的实践环节。
(一)教学目标和教学内容设计
引导企业深度参与,通过从智能网联汽车的生产实践中提炼出相应的科学问题,寻找其与校内教学内容的映射关系,共同设计科学合理的课程教学大纲。“智能驾驶导论”课程教学内容包括:智能驾驶的基本概念和发展情况、无人车的基本框架、车辆模型构建、智能驾驶中的感知技术、地图构建、定位与导航、车联网技术。“智能驾驶导论”课程为自动化技术和智能技术在无人系统工程中的应用打下基础,因此,设定的达成目标具体包括:(1)了解智能驾驶的发展历程与研究现状,通过现状分析和国家政策解读,了解我国及本土发展的优势和不足,激发学生的爱国主义情怀和科学探索精神。(2)掌握无人车的整体架构、常用传感器配置和各个模块的相关技术。(3)能够正确采集、处理、分析与解释传感器获得的数据,通过传感器数据检测和识别,如车道线、车辆、行人、交通标志等外部目标,构建环境地图并计算车辆自身位姿估计。(4)能够综合运用数学、自然科学、计算机/自动化工程基础和专业知识解决无人车导航问题。(5)通过小组分工合作,理解智能驾驶多学科交叉的融合,理解团队协作与分享的含义。
通过与企业多次探讨,设定该课程的基本要求如下:首先是知识。了解智能驾驶的发展,分级标准,体系结构;掌握常用的内外部传感器的原理和传感器数据处理方法;熟悉无人车的运动模型构建及其控制方法,掌握常用的定位方法、全局和局部路径规划方法,轨迹跟踪方法;了解车联网技术。其次是能力。通过课程学习,使学生具备智能机器人系统分析、研究和设计实现有关的基本能力。掌握智能驾驶的关键技术,包括构建无人车系统的思维和能力,培养学生快速、正确地应用和开发各种智能驾驶相关功能算法的能力。在智能驾驶的交叉知识的讨论中培养创新意识,提高分析、发现、研究和解决问题的能力。最后是素质。建立智能系统一体化的观念,通过课程中的分析、讨论、辩论,培养分析沟通交流素质,建立智能驾驶系统从设计到应用的思维模式,提升工程应用和管理的基本素质。通过国内外工程项目实例的分析讲解,使学生树立“科学无国界,科学家有祖国”的观念,提高学生政治思想觉悟,领悟社会主义核心价值观。通过课外导学的模式,增强自主学习和终身学习的意识。
此外,“智能驾驶导论”课程除了专业知识外,本身就存在智能技术发展过程中带来的一系列社会问题,有着很好的思想教育意义。随着当前无人驾驶技术的日益成熟和走向应用,出现了很多以往从未出现过的法律、交通法规、交通管理、道德等新问题,这些都是引发学生思考和讨论的绝佳案例,不仅为学生将来从事相关领域研究起到很好的参考作用,也成为课程思政的理想切入点。
(二)教学方法和组织模式
在课程组织与教学方法改革方面,大胆改革创新,设计了专家进课堂的授课模式、以问题链引导的探究式教学、以综合性项目为主的报告讨论的综合性教学方式。“智能驾驶导论”课程作为一门专业课程,学时有限,要在有限的课堂中让学生了解大量的前沿知识是不可能的,因此在教学过程中,通过问题、项目引导学生课外自主学习。
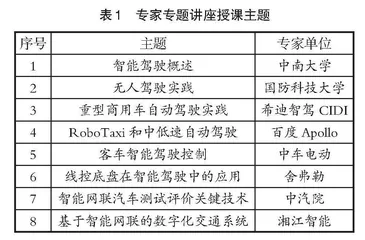
1.专家进课堂的授课模式。利用湘江新区智能驾驶的产业优势,邀请了校外相关企业和高校专家进行专题讲座授课,如表1所示,真正实现了导论课的全面了解智能驾驶发展历程、研究应用现状、涉及的知识点和企业能力需求等学习目标。企业专家从案例的角度来进行专题授课,提高了学生的兴趣,增进了学生对前沿知识和真实产品的了解和应用。对课程进行了全程录像,为后续在线课程开设打下了基础。
2.以问题链引导的探究式教学。根据授课主题设计有效的问题链,在不断提出问题、解决问题的过程中完成教学内容的输出,让学生带着问题离开,到课外通过查找资料、学习新的知识等自行探究问题的解。比如在智能搜索专题的讲授中,从路径规划问题出发,不断提出自动规划中面临的问题,在学生给出答案后,再一步步提出新问题,从功能需求、计算需求、存储需求、效率需求、最优化需求等方面引发学生积极思考,自主探究寻找问题的解。在问题链教学过程中,通过问答、讨论等,让信息在教师与学生之间、学生与学生之间交叉进行,有利于学生学习由被动向主动转变。
3.以综合项目为主的能力教学。综合性项目为主的报告讨论是面向智能驾驶中的某一问题将学生所学的知识进行综合,充分训练学生在代码编程、算法设计、模型优化、系统实现、合作开发、数据分析等多方面的能力。通过该项目的锻炼,全面提升学生的自主学习能力、研究能力、交流表达能力、团队合作能力、批判思维能力、创新创业能力,能够运用所学知识,并主动获取新的知识的能力。
(三)实践环节设计
考虑到授课对象专业和能力的差异性,本课程以综合项目和课程小型论坛来进行实践。由任课教师或企业导师从课程涉及的重点掌握知识点或智能驾驶产业的关键问题中挖掘实践题目,学生可组队任选其中一个项目进行实现。具体项目及要求如下。
1.基于视觉的车道线检测。要求能够完成处理视频的基本操作;能够检测至少两条车道线;能够不加区分地检测出黄色和白色的实线及虚线。考虑到能力差异,建议有能力的学生进一步能够在车道线发生污染、缺失的情况下检测出车道线;能够检测出弯曲车道线,并能够拟合出曲线;能够区分黄色和白色、虚线和实线。
2.基于视觉的行车环境中目标检测与识别。要求能够完成处理视频的基本操作,能够在视频中检测出行车道路中的机动车、行人、非机动车以及交通标志(包括交通灯与交通牌)。建议使用FASTER-R-CNN、YOLO、MASK-R-CNN等基于深度学习的目标检测算法;使用华为“八爪鱼”或labelme等标签工具打标签;训练样本,调整参数或模型结构;预测,并将结果绘制在图像上用以展示。
3.基于激光雷达在行车环境中的目标检测与识别。要求利用车载激光雷达采集点云数据,在点云中检测出行车道路中的机动车、行人、非机动车等目标,方法不限。
4.同时定位与建图(SLAM)。要求在课程授课的基础上,通过增加路标、修改观测模型来实现基于扩展卡尔曼滤波的定位与建图。进一步建议可将方法替换为粒子滤波器的方法;自行找到开源数据,选用其他方法实现SLAM过程。
5.基于激光的车道线检查。要求利用车载激光雷达采集点云数据,在点云中检测出车道线,方法不限。进一步建议:可根据激光和摄像头标定的参数,将激光数据映射到图像中,来显示车道线检测结果;将检测出的车道线点进行直线拟合,用直线来展示车道线;自行下载带有弯曲车道线的数据,进行车道线检测。
此外,鼓励学生积极自主思考进行自选命题。
综合性实践项目主要依托湖南湘江人工智能学院与国家智能网联汽车(长沙)测试区、希迪智驾CIDI、百度Apollo、华诺星空等企业共建的实践基地开展校企协同的实践教学方式,强化学生的动手能力锻炼。项目以分组形式完成,每个人均需完成项目中的部分内容。综合性实践项目完成后将提交报告和海报,并以小型学术论坛的形式进行展出。由任课教师和企业导师组成评审小组对各小组进行评分,组内则进行自评分。统计每组最终成绩,公布排行榜。每名学生的最终评分为组内得分和整组排名综合计算。
通过湘江新区政府支持和华为智能基座项目,引入华为自动驾驶云“八爪鱼”为学生课程实践提供平台,华为云和ModelArts为课程实践提供了计算力,并要求课程项目中采用华为的MindSpore深度框架,使学生了解和熟悉国产平台和框架,推广了智能驾驶和深度学习的国产化应用。
结语
“智能驾驶导论”课程通过两年的探索与实践,其改革和建设已经初见成效,学生对课程的满意度高,企业对学生通过课程培养的能力反馈评价好,课程模式推广辐射到湖南湘江人工智能学院其他基地,但该课程仍存在涵盖的知识点多、难度大等问题有待进一步改进。
参考文献
[1]关于印发《智能汽车创新发展战略》的通知:发改产业〔2020〕202号[A/OL].(2020-02-10)[2023-02-24].https://www.ndrc.gov.cn/xxgk/zcfb/tz/202002/t20200224_1221077.html.