基于MATLAB编程的“机械原理”课程教学改革探索
作者: 王志龙 张延超 尹明虎
[摘 要] “机械原理”课程是机械设计制造及其自动化专业的主干专业基础课,如何结合实际控制目标对“机械原理”课程教学进行创新改革值得深入思考。针对目前“机械原理”课程中涉及的机构,很难利用尺规作图法来快速得到任意机构中某一构件的运动学和动力学分析结果。为此,将基于MATLAB的计算机辅助编程融入“机械原理”课程教学中,让学生通过该部分的学习从理论上彻底了解并理解各机构的运动特点及其主要的设计思路。结果表明,参与教改班学生的知识体系在一定程度上得到了提升,成功实现了将基于MATLAB的计算机辅助编程融入“机械原理”课程教学改革中。为培养兼具机械结构设计、计算机编程技术及刚体动力学的复合型人才提供了强有力的支撑。
[关键词] 机械原理;MATLAB编程:机构动力学分析;机构设计;复合型人才
[基金项目] 2021年度西安理工大学教育教学改革研究项目“‘两性一度’导向下‘机械原理课程设计’贯通式教学改革与实践研究”(xjy2117);2022年度全国机械原理课程教学研究重点项目“机械原理课内外实践拓展及理实一体化融合方法研究”(2022JYJG1011)
[作者简介] 王志龙(1988—),男,陕西陇县人,工学博士,西安理工大学机械与精密仪器工程学院讲师(通信作者),主要从事机械设计及多相流粒子动力学研究;张延超(1978—),男,河南平顶山人,工学博士,西安理工大学机械与精密仪器工程学院教授,主要从事现代设计方法研究;尹明虎(1985—),男,山东济宁人,工学博士,西安理工大学机械与精密仪器工程学院讲师,主要从事现代传动、润滑与密封技术研究。
[中图分类号] G642.0 [文献标志码] A [文章编号] 1674-9324(2024)46-0049-04 [收稿日期] 2023-05-19
引言
“机械原理”[1-2]是机械设计制造及其自动化专业的主干专业基础课、必修课、学位课。课程旨在使学生通过学习机械的共性知识,通用机构的构成、工作原理、设计方法和机械动力学基本理论,使学生熟悉常用机构的工作原理、运动特点和工程应用领域,掌握机构的运动分析、动力分析和设计方法[3-4]。传统的“机械原理”课程多采用基于尺规作图的矢量方程图解法对机构的运动学和动力学进行分析。这种分析方法简单,易于上手,但只能得到特定的几组条件下的结果,很难获取在机构运动过程中的连续结果。通过与MATLAB编程相结合,学生能够在现代的“机械原理”课程中采用解析法对机构的运动学和动力学进行分析[5-6]。这种基于MATLAB编程的解析法能够清晰地看到任意输入条件下各机构中构件的运动位置及各构件的受力等[7-8]。最后,通过与实验课程教学相结合,使学生能够具备一般机械运动方案设计、分析和判断能力,从而培养学生在方案设计中的创新意识,为今后解决在工程设计中遇到的问题奠定坚实的基础。
一、“机械原理”课程的性质及教学目的
“机械原理”课程通过课堂理论教学讲授基本机构的组成理论、机构运动学和动力学分析方法,机器动力学分析方法及常用机构的构成原理、性能特点和设计方法,配合课程实验教学和课外作业训练,使学生掌握通用机构的结构分析、运动分析和动力分析基本方法,培养学生应用机械相关科学原理和科学方法对机械系统进行方案设计与分析的能力,以及综合运用机构学和动力学相关知识解决复杂机械系统方案设计的能力,培养学生在机构方案设计中的创新意识。
本课程分为课堂教学和实验两部分。课堂教学使学生掌握机构结构分析的基本知识、机构的运动分析、机器动力学和常用机构的分析与设计方法等基本理论,培养学生综合运用课程知识的能力和机械传动系统方案的设计与分析能力。通过讲授机构的结构分析、平面机构的运动分析和平面机构的力分析使学生掌握基本机构的构成原理和科学分析方法;通过讲授连杆机构、凸轮机构、齿轮机构及其他常用机构的构成原理和设计方法,使学生掌握常用机构的构成原理、工作特点和设计方法,具备方案设计中的常用机构选择和设计能力,具有方案设计的创新意识;通过讲授机械效率和自锁、机械运转与速度波动调节和机械的平衡,使学生掌握机械工作中的特殊现象、原理和机器动力学分析方法,培养学生进行机械系统方案设计、建模、分析和方案改进的能力;通过机械系统的方案设计,使学生掌握一般机械系统方案设计的原理、流程和方法,培养学生解决机械系统方案设计和分析的能力。实验教学环节强化理论学习效果,使学生能够理论联系实际,培养学生的发现问题、分析问题、解决问题、动手实践、方案创新设计、书面表达、个人分工与团队合作等方面的能力。课程实验教学中,以团队合作方式根据机器实体模型绘制机构运动简图,培养学生的动手实践能力及团队合作与交流沟通能力;利用齿轮范成仪掌握齿轮的加工方法和过程,使学生掌握典型零件的工作原理和加工方法,培养学生理论联系实际、分析问题的能力和创新意识;通过刚性转子动平衡和调试实验,培养学生利用专业知识分析问题、解决问题和设计方案的能力。
二、基于MATLAB编程的机构动力学分析教学改革探索
传统“机械原理”课程教学中,通常采用矢量方程图解法进行分析,而现在的“机械原理”课程教学中,则考虑融入MATLAB程序代码进行分析。对于图解法,首先,需要做出机构的运动简图;其次,利用不同构件在某一重合点的运动合成原理,建立重合点间的速度矢量方程(包括各速度的大小和方向),作速度矢量图,并选择合适的速度比例尺,求解未知构件速度的大小和方向;此外,利用不同构件在某一重合点的运动合成原理,建立重合点间的加速度矢量方程(包括各加速度的大小和方向),作加速度矢量图,并选择合的加速度比例尺,求解未知构件加速度的大小和方向。然而,在此过程中,还需要注意巧妙运用便捷图解法如速度瞬心法和“三心定理”等。运动学分析结束后,再以机构中某个构件为刚体列出其平面运动的三个平衡方程,同时,考虑摩擦时需要注意摩擦圆和摩擦角对力的方向的影响,最终获得机构中构件的动力学结果。
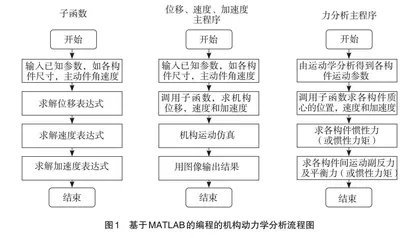
基于MATLAB编程的机构动力学分析是新工科班学生的新探索。图1表示了基于MATLAB的编程的机构动力学分析流程图。具体地,首先,建立机构的封闭矢量多边形,并转化为复数矢量形式后进行虚实分离得出位置矢量方程。对位置矢量方程求一阶导数得出速度矢量方程,对位置矢量方程求二阶导数得出加速度矢量方程,同时,将位置、速度及加速度矢量方程整理为矩阵形式,以方便存储在MATLAB所定义的矩阵中。另外,数学模型的建立还应包括对机构中每个构件进行动态静力分析,列出每个刚体构件平面运动的平衡方程。最后,将所有构件的力方程写成矩阵方程组如GFR=D的形式,其中,G是系数矩阵,FR是未知力矩阵,D为力矩阵。图1表示了基于MATLAB的编程的机构动力学分析流程图,包括一个子函数和两个主函数,其中,子函数是求解位移、速度及加速度的程序;主函数是计算位移、速度及加速度的主程序和力分析的主程序。
基于MATLAB编程的机构动力学分析主要是解决以往传统课程教学中图解法分析效率和精度低及分析速度慢等问题,其改革内容主要是针对平面连杆机构,如插齿机插刀行程机构的运动学和力学分析、插床导杆机构的运动学分析、摇摆送进机构的运动学和力学分析、冲床机构的运动学分析、曲柄摇块机构的运动学和力学分析、曲柄双滑块机构的运动学分析及六杆机构的运动学分析等。在教学改革后,学生能够清晰地看到机构在运动到任意位置时,各构件的位置、速度、加速度及力的数值大小。特别地,基于MATLAB编程的机构运动学分析还能够给出任意机构在运动过程中按给定的初始条件运动的动画,让学生能够切实地感受到任意平面连杆机构中各构件是如何进行运动及力是如何进行传递的。因此,从以上教学改革内容可以看出,基于MATLAB编程的机构动力学分析对于当代学生的学习和发展具有重要意义。
三、基于MATLAB编程的机构设计教学改革探索
机械原理中机构设计包含了平面连杆机构的设计、凸轮机构的设计及齿轮机构的设计。将MATLAB编写的程序融入机械原理机构设计中,对于新工科班学生快速掌握相关机构的设计方法具有重要意义。以凸轮机构的设计为例,首先,画出基圆及推杆的起始位置,定出推杆在理论廓线上的起始位置,并建立直角坐标系。其次,根据反转法及推杆的运动规律(包括等速运动规律、等加速等减速运动规律、余弦加速度运动规律及正弦加速度运动规律等),确定推杆尖端点的坐标方程,得出理论廓线方程。再次,由理论廓线方程确定实际廓线方程。最后,凸轮轮廓曲线程序设计的基本流程是:先输入凸轮结构参数,然后计算推杆的运动规律,接下来计算凸轮的理论廓线和实际廓线上点的坐标,从而绘制出凸轮的轮廓曲线,实现凸轮机构的设计。另外,对于齿轮机构设计的问题,可分为两种情况:一是当利用渐开线函数来求解压力角时,应基于渐开线函数θK=inv αK=tan αK-αK,应用牛顿迭代法对f (αK)=θK-tan αK+αK函数求导,当满足误差时可获得压力角αK的近似根。二是当已知标准直齿圆柱齿轮的齿数z、模数m、压力角α、齿顶高系数ha*和顶隙系数c*时,先根据渐开线工作齿廓上任意一点的压力角确定渐开线工作齿廓上任意一点的直角坐标;然后依次计算渐开线齿廓左侧各点的矢径ri、压力角α、展角θ、坐标(xi,yi)等参数,并将各数值存储于二维数组中;接下来通过坐标变换齿形曲线绕中心O依次旋转2π/z获得其他各齿形曲线。以此类推,将MATLAB编写的程序融入“机械原理”课程机构设计教学的例子非常多,这里就不再逐一介绍。
基于MATLAB编程的机构设计教学改革主要是解决以往传统课程教学中分析效率和精度低及分析过程抽象等问题,改革内容主要是针对平面连杆机构设计、凸轮机构设计及齿轮机构设计等。其中,平面连杆机构设计可以归纳为三类问题:第一,满足预定的运动规律要求;第二,满足预定的连杆位置要求,即要求连杆能占据一系列的预定位置;第三,满足预定的轨迹要求,即要求在机构运动过程中连杆上某些点的轨迹能符合预定的轨迹要求。另外,凸轮机构设计则是通过推杆的推程运动、远体运动、回程运动及近体运动,直接计算凸轮理论廓线上尖顶点、滚子圆心点及平底推杆切点的坐标,进而计算凸轮实际廓线上相应点的坐标,最后绘制凸轮轮廓曲线。特别地,在齿轮机构的设计过程中,能够给出渐开线齿轮的范成运动的动画,这种生动形象的教学改革使得学生能够快速理解范成运动原理并了解齿轮啮合原理。因此,从以上教学改革内容可以看出,基于MATLAB编程的机构设计对于学生的学习和发展也具有重要意义。
结语
“机械原理”课程在实行教学改革以来,将基于MATLAB编程融入“机械原理”教学之中,一方面,形象地展现出了机械内各机构的运动情况,精确地分析出了平面连杆机构中各构件的运动学及动力学参数,例如位置、速度、加速度、支反力等;另一方面,从原理上计算出凸轮机构和齿轮机构的轮廓曲线方程,实现对凸轮机构和齿轮机构的设计。让学生通过教学改革后机械原理的学习,实现与计算机辅助编程、理论力学、高等数学及机械结构设计等专业基础课程的紧密衔接,参与教改班学生的知识体系在一定程度上得到了很大的提升,成功地将基于MATLAB的计算机辅助编程融入“机械原理”课程教学改革中。为培养兼具机械结构设计、计算机编程技术及刚体动力学的复合型人才提供了强有力的支撑。
参考文献
[1]王波,庞军,宁毅,等.新工科背景下“机械原理”教学改革与实践:以滁州学院为例[J].滁州学院学报,2022,24(2):117-121+126.
[2]翟兆阳,曲雅静,尹明虎,等.数控装备设计理念融入单片机课程教学[J].教育教学论坛,2023(10):141-144.
[3]宋娓娓,刘胜荣,汪洪峰,等.应用型本科院校《机械原理》课程教学改革思路的探索[J].黄山学院学报,2019,21(5):114-116.
[4]董枫,潘海鹏,王小平.CAX技术在机械原理教学中的应用研究[J].中国轻工教育,2019(5):83-88.