AUV惯性基组合导航虚拟仿真在实验教学中的应用
作者: 马晓爽 郭家杰 朱乔红 胡正忻
[摘 要] 为满足实验教学需求,基于vue3框架设计并开发了自主式水下航行器(Autonomous Underwater Vehicle,AUV)惯性基组合导航虚拟仿真实验平台,以服务本科生的模拟真实海洋环境的导航实验教学环节。该平台集成了几类经典导航传感器模型和信息融合算法,学生可通过交互式可视化界面对运载体机动状态、导航传感器参数进行设置,从而获得反映真实环境的传感器模拟数据,并进行导航解算、重复观察,揭示不同实验条件、不同导航方式以及不同导航算法对于导航性能的影响。通过该虚拟仿真实验平台进行实验教学,突破了传统实验教学的诸多限制,具有教学方法合理、实验界面设计科学、代码可移植性和扩展性好等优点,有助于学生深入理解惯性基组合导航原理。
[关键词] 自主式水下航行器;惯性导航;组合导航;虚拟仿真实验平台
[基金项目] 2023年度江苏省高校教育信息化重点研究课题“新工科背景下虚拟仿真平台在多传感器数据融合实验教学中的应用”(2023JSETKT040);2024年度教育部产学合作协同育人项目“多传感器数据融合实践平台与特色人才培养课程体系建设”(230906747084517)
[作者简介] 马晓爽(1992—),女,山东德州人,博士,无锡学院自动化学院讲师(通讯作者),主要从事惯性导航与信息融合技术研究。
引言
自主式水下航行器(Autonomous Underwater Vehicle, AUV)作为一类重要的水下平台载体,对我国建设海洋强国、捍卫国家安全和实现可持续发展具有极其重要的战略意义[1]。AUV具有自主性好、无电缆束缚、机动灵活性强、作业范围广、体积小、噪声低、隐蔽性好等优点,在军事和民用领域具有广阔的应用前景[2]。
高精度导航定位是AUV能够成功完成作业任务且安全返回的技术保障[3]。AUV组合导航系统将多种水下导航技术的优点适当融合,不仅可以提高导航精度,而且可以适当地降低对单一导航系统器件的精度要求及系统成本,提高了系统的可靠性和容错性能,是提高AUV水下导航系统性能的有效途径之一[4]。AUV组合导航是一个技术难点大、影响因素多、涉及范围广并且复杂程度相对较高的自主导航定位系统,学生缺乏对实际系统的直观认知,传统的分组统一授课模式受到时间和空间限制,实验过程难以具备灵活性、重复性和可操作性,既不利于实验教学的成效,也抑制了学生的主观能动性[5-6]。实验技术人员及教师在传统实验过程中需要进行实验项目准备,所有的实验操作流程基本固定,学生通常只能遵守多项实验规定,而缺乏必要的交互环节,实验结果缺乏实时性[7]。在传统实验过程中,由于实验设备、实验环境等因素的影响,实验教学只能集中于部分疑难点教学,大部分知识难以通过实验教学进行验证,从而使得实验课程覆盖率较低,无法帮助学生将所有知识在实践中获得验证与巩固,尤其是设备及理论知识更新较快,难以让学生根据当下研究热点进行实验,影响了学生的知识更新与专业成长,不利于培养符合行业发展的创新型高质量人才[8]。因此,本文基于Vue3设计并开发了AUV惯性基组合导航虚拟仿真实验平台。通过建立AUV动力学模型、惯性导航系统、卫星导航系统、声学导航系统等模型数据库以及相关的信息融合算法库,旨在解决实验教学成本高、场地有限、操作复杂与实际条件难以满足之间的矛盾,克服传统教育与实践之间的鸿沟。该虚拟仿真实验平台在降低教学成本、提高实验安全性的同时,更能为学生提供近乎真实的操作体验,使学生直观形象地了解并掌握多传感器融合技术在实际水下导航系统中的应用实例,激发学生的主观能动性,培养学生建立科学的实验方法体系,从而提高学生理论联系实际的能力。
一、AUV惯性基组合导航系统方案
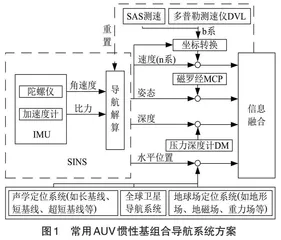
要实现AUV组合导航系统设计,需要完成大量的导航传感器数据的采集。AUV水下组合导航在现阶段主要以中高精度的捷联式惯性导航系统(Strapdown InertialNavigation System, SINS)为核心,辅以多普勒测速仪(Doppler Velocity Log, DVL)、压力深度计(Depthometer, DM)、磁罗盘(Magnetic Compass Pilot, MCP)以及各类辅助定位系统(声学定位系统、地球场定位系统、卫星定位系统等)[9-10]。然而,各种实验仪器、实验设备、实验材料的价格昂贵、折旧率高,而且具有一定的安全隐患[11]。此外,还要综合考虑各传感器测量机理、无线传输信号、海水介质以及水下工作环境带来的各类导航信息源异构、区域性与阶段性、更新频率低、易被干扰的不可完全依赖性、时延不确定性以及精度变化等因素对导航定位性能的影响[12]。
除了需要采集大量的各类导航传感器数据外,更重要的是对这些数据进行合理配置与有效融合,多源信息融合是决定AUV水下导航定位精度的关键技术之一。为此科研工作者开发了许多信息融合算法[13]。该虚拟实验平台将几类经典导航传感器模型和信息融合算法纳入实验环节,学生可通过交互式可视化界面对运载体机动状态、导航传感器参数进行设置,获得反映真实环境的传感器模拟数据,并进行导航解算,重复观察和对比不同实验条件、不同导航方式以及不同导航算法对于导航性能的影响。
二、虚拟仿真实验平台设计
整个AUV惯性基组合导航虚拟仿真实验平台的设计采用了层次化和模块化的结构,分为三个主要层次:底层数据模块、上层算法模块和精度评估模块,该设计使得数据流和处理过程清晰可见,便于系统的开发和维护。各个结构功能模块及数据流走向如图2所示。整个平台的数据流向清晰明确:底层模拟器生成的数据可以灵活地输入不同的上层算法模块,算法模块的输出则汇总到精度评估模块。
底层数据模块是整个平台的基础,将AUV动力学模型、SINS、GPS、DVL、MCP、TAN、DM以及其他各类导航传感器以模拟仿真形式加以提炼,建立各子系统及传感器的数学模型或其误差数学模型。这些模块负责生成AUV及各种传感器的模拟数据,模拟真实AUV导航系统中的各种传感器输出。平台允许用户手动设置和输入各种参数,这种灵活的仿真条件设置功能使得用户可以根据需要调整各种传感器参数、初始条件以及AUV的运动轨迹,从而模拟各种不同的导航环境和条件。
上层算法模块是平台的核心,包含了不同导航模式下多种导航算法的实现,如纯SINS导航解算模块、SINS/GPS组合导航解算模块、SINS/DVL组合导航解算模块、SINS/TAN组合导航解算模块,以及SINS/DVL/MCP/TAN/DM全源组合导航解算模块等。这种设计允许用户选择不同导航模式、不同导航算法进行仿真,便于比较和分析不同算法在各种导航模式下的性能表现。上层算法模块直接接收来自底层数据模块的模拟传感器数据,进行导航解算,然后将结果传递给精度评估模块。
精度评估模块位于平台的最上层,负责对导航定位的输出结果进行综合评估和比较,包含了误差分析、性能指标计算、数据可视化等功能,用于直观展示和比较仿真结果,以增强用户体验和数据分析能力。
三、虚拟仿真实验主要流程与实现
本项目主要采用自主式实验方法,实验项目以应用形式引入,将各个应用环节拆分为多个模块并嵌入知识点,学生在操作应用流程时掌握知识点。同时,配备详细实验参考和实验指导,学生完全能够通过自主操作的方式完成AUV惯性基组合导航模拟实验。具体实验操作流程如下所示。
进入平台之前进入用户登录界面,分为教师登录和学生登录,实现学生端和教师端的分离,从而方便教师进行授课以及整体算法和数据的导入。
登录AUV惯性基组合导航虚拟仿真实验平台网页主界面,点击菜单栏,可进入相应环节。
依次点击菜单栏上的各项内容,完成AUV轨迹设计、各类导航传感器参数选择和设置、导航模式与信息融合方法选择等。
完成上述步骤,即可进行在线模拟,查看导航解算结果。通过点击主界面的精度评估功能对实验数据做进一步分析,确认实验结果是否符合实验要求。如果实验结果存在问题,可返回重新设置实验条件、调整实验参数进行反复测试;如果实验结果满足实验要求,则可通过菜单栏下的在线报告功能提交实验报告。
按照系统引导,完成实验报告撰写并在线提交;系统自动生成题目,以检测学生对实验原理学习、实验步骤操作以及实验数据分析的理解和把握情况,把成绩反馈至指导教师处,作为参考依据;指导教师根据学生的表现,按照预设加权值,综合评定学生实验成绩。
四、主要创新点
(一)设计思路创新
AUV惯性基组合导航虚拟仿真实验平台主要是针对在水下导航定位过程中观察、操作、重复难度大,成本高、设备更新慢,且与实验空间、时间相对有限的矛盾而设计开发的。学生通过短短数个小时就能够模拟整个AUV惯性基组合导航项目从需求到完成的一整套设计环节,能够有效缩短实验周期,有利于学生直观全面地应用知识,提高学习效率和学习质量。
实际中的AUV水下导航系统不仅对实验环境要求高,难以同时进行多组实验;而且实验仪器和实验设备具有一定的安全隐患,需要投入大量的人力和物力来维持。通过虚拟仿真实验平台,不仅有效地克服了空间和时间上的限制,消除了安全性上的顾虑;而且保障每名学生都可以参与到实验设计中,从而能够提供较为理想的实验平台。
(二)教学方法创新
该虚拟仿真实验平台基于Vue3框架开发设计,学生可以通过网页随时登录在线操作,不受传统实验教学时间和空间上的限制,方便学生自主学习。此外,该虚拟仿真实验平台具有良好的可移植性和扩展性。一方面,学生可以通过实验平台源代码深入理解相关导航解算原理;另一方面可以鼓励学生在虚拟仿真实验平台基础上优化现有导航算法,添加新的导航算法以及新功能,从而实现创新研究型实验教学的目的。
结语
本文基于Vue3设计并开发了AUV惯性基组合导航虚拟仿真实验平台,在此项实验平台上采用学生线上自主操作为主,教师线上指导为辅的探索性实验教学方法。学生直观形象地了解并掌握了多传感器融合技术在AUV水下导航系统中的应用实例,学生得以更好地理解理论知识和技术在实际应用中的设计思路和开发流程。学生的主观能动性得到激发,培养学生建立科学的实验方法体系,提高了学生理论联系实际的能力。教师可以从中清晰了解学生的学习效果和尚待解决的问题,有利于今后课堂教学的优化。此外,本实验平台还为师生提供了一个互动平台,方便教师及时解决学生疑问,提高综合教学质量。
参考文献
[1]黄玉龙,张勇刚,赵玉新.自主水下航行器导航方法综述[J].水下无人系统学报,2019,27(3):232-253.
[2]SANCHEZ,PAPAELIAS,MARQUEZ.Autonomous underwater vehicles: instrumentation and measurements[J].IEEE instrumentation and measurement magazine,2020,23(2):105-114.
[3]LIU Yi-xu, SUN Yong-fu,LI Bao-gang, et al.Experimental analysis of deep-sea AUV based on multi-sensor integrated navigation and positioning[J].Remote sensing,2024,16(1):199.
[4]GONZALEZ-GARCIA, GOMEZ-ESPINOSA, CUAN-URQUIZO, et al. Autonomous underwater vehicles: localization, navigation, and communication for collaborative missions[J].Applied sciences-basel,2020,10(4): 1256.
[5]罗祖兵.由“标准化”到“个性化”:信息社会中的教学变革[J].电化教育研究,2011(9):11-15.