车路协同虚实一体实验平台探究
作者: 李海舰 赵晓华 李振龙
[摘 要] 车路协同虚实一体实验平台是主动适应智能汽车创新发展、交通强国等国家战略,赋能新一代智能交通人才培养。从传统交通人才培养模式和适应未来人才需求两个角度出发,积极开展人才培养的探索和实践,分析了实验平台具有的网联设备虚拟、智能车辆虚拟、交通系统虚拟的特征,提出了实验教学模式框架。进一步探讨了“软硬一体、虚实一体、个体群体一体”的学生实践实训教育模式和平台实施方案,助力多元化、多维度、多阶段的新一代智能交通人才培养和学科专业建设。
[关键词] 实验教学;车路协同技术;虚实一体实验平台
[基金项目] 2021年度教育部产学合作协同育人项目“智能网联车先导试验平台项目”(202102121003);2020年度北京工业大学城建学部教学研究课题“面向交通设备与控制工程本科生综合素质提升的车路协同教学实训平台设计”(2020B0401)
[作者简介] 李海舰(1986—),男,河南周口人,工学博士,北京工业大学城市建设学部副教授,主要从事智能交通技术研究;赵晓华(1971—),女,山西太谷人,工学博士,北京工业大学城市建设学部教授(通信作者),主要从事驾驶行为与交通安全研究;李振龙(1976—),男,山西五台人,工学博士,北京工业大学城市建设学部教授,主要从事交通管理与控制研究。
[中图分类号] G642.0 [文献标识码] A [文章编号] 1674-9324(2023)43-0025-04 [收稿日期] 2022-09-07
引言
当前围绕智能网联汽车的科技革命成为全球新一轮竞争的重要内容,基于车路协同的智能网联汽车为我国的发展方向[1]。为加快推进智能网联汽车创新发展,国家发布《智能汽车创新发展战略》等政策,强化对交通人才的培养,加快建成交通强国。结合交通强国国家战略需求,并在自动驾驶、车路协同等方向尽早实现知识、技术储备和应用落地,当前的人才培养需要更加重视理论、实践相结合和技术-应用再现式教学。但是智能车及车路协同技术在我国尚未大规模落地,较难实地开展相关实训内容,同时随着智能系统的不断发展,现有平台无法满足新一代智能交通人才培养需要,智能车、车路协同、智能基础设施、虚拟现实等教学内容无法在现有平台实现。
因此需要在智能交通相关专业学生培养中搭建车路协同教学实训平台用于在智能汽车、车路协同相关知识的学习和项目实践,本研究从面向网联设备虚拟、智能车辆虚拟、交通系统虚拟实验教学需求入手,并通过融合从低虚拟度到高虚拟度的耦合设计,实现“软硬一体、虚实一体、个体群体一体”的科研及实训化教育模式。
一、培养新一代智能交通人才是教育主动适应科技发展的战略选择
推进交通强国的建设,是建设现代化经济体系的先行领域,是全面建成社会主义现代化强国的重要支撑。其中,发展智能汽车,则有利于推动人类社会和诸多相关产业智能化水平的全面升级,突破关键技术瓶颈,增强新一轮科技革命和产业变革引领能力,加快建成科技强国和交通强国[2]。随着我国经济的发展,汽车普及度随着人均消费水平提高而增加,我国汽车保有量当前已经超过4亿台,伴随智能交通的发展环境下,预计2023年车联网用户将超过9 177万户[3],车联网汽车的市场需求将逐渐增加。
未来,随着5G技术的推广、车联网技术的发展以及自动驾驶汽车道路测试的不断推进,我国车联网行业将朝着“车路云网一体化”方向快速发展,实现“车—路—人—云”的信息交互[4],当前车路协同在中外的发展仍停留在理论研发、实验测验与局部商用阶段,车联网在真正落地之前,大规模并发等方面仍有许多关键技术亟须突破[5],有待提升技术与应用水平,相关领域仍存在较多技术难题,亟待培养新一代智能交通人才。
二、车路协同虚实一体实验平台助力新一代智能交通人才培养
随着车联网技术应用的不断深入,智能交通相关专业学生对智能车、车路协同技术的学习和实践需求不断增强,急需在智能交通相关专业学生培养中搭建车路协同教学实训平台用于学生在智能车、车路协同相关知识的学习和项目实践。目前智能车及车路协同技术在我国尚未大规模落地,较难实地开展相关实训内容。国内众多高校智能交通相关专业开设交通实验课程和探索搭建交通实验平台,专业实验教学主要是通过实地认知、户外调查、视频观看和平台操作等实现方式,存在安全性差、实验平台单一和难以调动学生积极性等弊端。
先进的智能信息技术赋能面向新一代智能交通人才培养需求的车路协同虚实一体实验平台建设。本研究从面向网联设备虚拟、智能车辆虚拟、交通系统虚拟实验教学需求入手,实现“软硬一体,虚实一体,个体群体一体”的实训化教育模式,能够全方面、多维度支撑“交通信息与控制技术基础”“智能车与车联网技术”“交通软件训练”“交通信息与控制项目实践”以及“智能车与车联网技术项目实践”等课程。同时打破时空限制,学生在实验室即可体验前沿智能交通技术,提升学习兴趣的同时从中获取实训技能,对接教育教学需求。新一代虚拟仿真平台融合“场景—互动—可操性”于一体,以高仿真度性能解决与真实道路条件下的一致性问题,主动训练学生跨学科专业技能。
三、车路协同虚实一体实验平台实验教学模式框架
(一)培养目标
虚实一体实验平台以多学科交叉融合为特色,以自主创新实训为手段,以团队协作为组织模式,以培养综合知识应用及创新能力为目标,惠及交通运输工程、车辆工程、自动化工程、软件工程、通信工程等专业的学生,构建以多学科交叉为特色的综合应用实训平台,培养学生自我发展、自我实践的创新能力。通过提升学生对基础理论和技术的理解,提高学生的实践应用能力和解决实际问题的能力,并将本学科最新的科研成果应用到实验教学中,实现以“学生能力培养”为核心,有效提高学生参与实验的积极性和主动性。
(二)实验教学系统架构
虚实一体实验平台依托于开放式虚拟仿真实验教学管理平台的支撑,通过数据接口无缝对接,保证用户能够随时随地通过浏览器仿真该项目,并通过平台提供面向用户的智能指导等功能,帮助用户实现自主实验,加强实训项目的开放服务能力,提升开放服务效果。
平台由物理实体层、数据层、支撑层、服务层、虚拟层、应用层、实训层等七层架构,每一层都为其上层提供服务,以计算机仿真技术、多媒体技术和网络技术为依托,采用面向服务的软件架构,集路网设计、场景搭建、交通仿真、智能指导和教学管理于一体。该平台架构涉及的主要研发技术包括:信息采集、通信、网联、车路协同、信号控制、数字孪生、在环仿真、多源数据汇聚、虚拟现实/增强等。
(三)车路协同虚实一体实验平台搭建
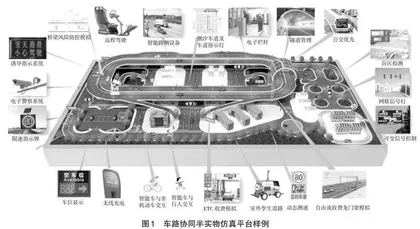
1.车路协同半实物仿真子平台搭建。车路协同半实物仿真子平台秉承“数字孪生+硬件在环”搭建思路,达到混合虚拟车路协同典型应用场景目的。平台涉及物理实体,如道路元素、交通元素、平台物理模块等;网络层涉及通信模块,有线/无线通信、物理元素之间的连接等;传输层涉及交通与网络数据采集、传输、存储、信息服务等;在功能层面,涉及数据挖掘、融合、策略生成等。平台的中控系统功能可进行参数配置、指令下发、设施设备状态展示、智能车调度、智能交通管理与控制等。
平台搭建过程中采用模块化、积木式设计思想,实现任意模块间的拆分和组合,利于各模块定制化设计和组装。在此基础上构建三维立体化的典型车路协同应用场景,将智能交通学科内容尽量移植到实验室内,可将实际应用场景最大限度展现于教学活动中,有助力于车路协同系统关键技术的测试和演示,平台样例如图1所示。
平台配套的微缩智能车具备红外测距、陀螺仪、深度摄像头、微型雷达、RFID(Radio Frequency Identification)等传感器模块,能够动态自主决策,根据不同路况实现速度和舵机角度的动态调整,进而实现单车自动驾驶;同时,微缩智能车也能够支持多辆智能车编队行驶,行驶过程中智能车辆实时交换行车信息和决策信息,实现多车的动态信息交互,通过合理的编队控制策略实现车辆跟驰及分合流区域控制,避免出现急刹、碰撞、加塞等行为。基于平台不同的软硬件功能和道路元素,智能车辆、路侧设施等之间能够表现不同车路协同场景下信息交互模式。以实际典型车路协同场景为原型,实现相应场景在车路协同半实物仿真平台上高还原度仿真,包括智能车与可变限速标志协同实验,实现路侧设施与可变限速标志之间实时的信息交互;智能车与信号机协同实验,实现提前感知交叉口信号灯状态信息,并采取相应驾驶行为;前向碰撞预警实验,利用车辆之间通信模式及车载传感器实现车辆避撞等车路协同技术应用场景再现。
2.智能车辆驾驶模拟实验子平台构建。驾驶模拟技术因其能够高仿真度再现车路协同应用特殊场景,提取特殊人群不同场景下行为表现特征,具有“人在环”科研及教学优势,是研究驾驶员在车路协同环境下驾驶行为特性的有力工具,也是学生学习和理解智能车辆及车路协同技术的有效途径。面向智能车辆驾驶模拟虚拟实验子平台主要是基于驾驶模拟系统及辅助设备搭建而成。驾驶模拟系统由实车、中控设备、影音系统及投影装置四部分组成,可动态采集坐标、速度、加速度、横向偏移、刹车、油门等车辆运行和操控数据,平台配置可动态交互的人机交互智能终端。驾驶模拟实验平台利用绘图软件开发虚拟场景,利用应用程序接口(Application Programming Interface,API)添加不同道路、天气、交通状况等车路协同系统元素,利用用户数据协议(User Datagram Protocol,UDP)实现驾驶仿真与外部用户终端间数据交换,并通过无线通信(WiFi)实现驾驶模拟与平台智能车的互联互通。
平台可实现多元信息交互,满足高仿真度的车路协同驾驶场景数字孪生,支持交通场景、管控方案、外部环境、人群特点、基础设施、车路协同技术等典型应用场景基于科研和教学目的的自定义设置,可以使学生在特定的车路协场景中掌握学习内容,解决传统课堂中情境性、互动性、沉浸性不强等问题。
3.车路协同系统交通流虚拟仿真子平台构建。车路协同等新技术的融合发展促进了车辆群体控制的变革,但同时也带来车辆群体行为自组织和一致性不易刻画等问题,而借助交通流仿真平台直观仿真,便于观测车辆群体行为对基础设施利用效率和通行效率的影响。基于VISSIM、SUMO等交通仿真软件搭建面向车路协同系统的交通流虚拟仿真子平台,再造车路协同交通流仿真环境,研究车路协同信息作用下跟驰行为、换道行为到车队群体行为的状态推演,探究跟驰模型数学化描述及精细化参数标定方法。与此同时,通过搭建模拟环境下的路网模型,模拟交通管控措施下的区域交通流运行情况,并与初始状态(未使用交通管控措施)区域仿真结果对照,评估交通管控措施对交通流运行的改善效果。
结语
加强新一代智能交通人才培养,推进智能网联汽车的发展与交通技术应用,将加快交通强国的建设。本研究结合智能交通领域科技发展前景、传统教学问题及对实践教学的创新需求,提出了搭建车路协同虚实一体实验平台及实施路径,可用于提高学生在车路协同、自动驾驶、智能网联汽车相关知识的学习和项目实践,建设特色实验教学,培养学生的核心能力,提高参与实验的积极性和实验应用能力,助力专业建设与人才培养。
参考文献
[1]刘宗巍,宋昊坤,郝瀚,等.基于4S融合的新一代智能汽车创新发展战略研究[J].中国工程科学,2021,23(3):153-162.
[2]边明远,李克强.以智能网联汽车为载体的汽车强国战略顶层设计[J].中国工程科学,2018,20(1):52-58.
[3]黄良昌.基于车联网应用智能辅助驾驶系统的思考[J].科技创新与应用,2021,11(29):57-59.
[4]王雪柠,翟媛,朱松.我国车联网行业发展环境及趋势影响分析[J].汽车工业研究,2021(2):2-7.