人工智能时代研究生机器人课程教学模式探索
作者: 李星辉 李博亮 曾龙
摘 要:该文面向研究生群体的教学改革需求,旨在提出在人工智能时代下机器人课程的教学模式。针对现有机器人课程有限教学时间内硬件和软件知识模块分离、实际场景线条不够突出、人工智能技术导入不充分的现状,该文通过构建实际场景知识主线、增加智能感知的前沿技术知识模块、设置高匹配度的实践环节,加深学生对机器人整体系统及其智能化发展方向和路径的理解。通过内容和教学模式的改革,提升课程教学质量,以更好地满足学生的科研与从业需求及领域内企业对人才的需求。
关键词:机器人课程;研究生教学;智能感知;人工智能;课程改革
中图分类号:G643 文献标志码:A 文章编号:2096-000X(2024)36-0059-05
Abstract: This paper addresses the teaching reform needs for graduate students, aiming to propose a teaching model for robotics courses in the era of artificial intelligence. In response to the current situation where the hardware and software knowledge modules are separated within limited teaching time, the actual scene lines are not sufficiently highlighted, and the introduction of artificial intelligence technology is inadequate, this paper constructs a knowledge mainline based on practical scenes, adds cutting-edge technology knowledge modules for intelligent perception, and sets up highly compatible practical components. These measures deepen students' understanding of the overall robotics system and its intelligent development directions and paths. Through reforms in content and teaching models, we enhance the quality of course instruction to better meet the research and employment needs of students and the talent requirements of enterprises in the field.
Keywords: robotics courses; graduate education; intelligent perception; artificial intelligence; curriculum reform
机器人被誉为“制造业皇冠顶端的明珠”,作为《中国制造2025》的十大重点发展领域之一,机器人行业拥有巨大的市场并保持着飞速的发展。在2023年,工业和信息化部等十七部联合发布了《“机器人+”应用行动实施方案》[1],明确指出需要加强机器人教育引导,完善教学内容与实践环境。目前,各高校纷纷开设了相关重点专业和课程。由产业引领、政策推动和高校跟进等多方面因素的共同作用下,对机器人领域人才的需求日益增加。高校机器人课程的设立及不断迭代,对于该领域的人才培养具有重要意义[2]。
近年来,机器人技术朝着“具身”方向发展[3-5],即强调机器人与其环境的物理交互能力,这一趋势对于机器人在复杂环境中的应用至关重要。“具身”机器人需要具备更高的感知、决策和行动能力,以适应多变的环境和任务需求。机器人技术也逐渐朝着通用方向发展。机器人课程作为相关人才培养的第一站,如何适应上述产业届的发展,成为课改的重要考虑因素。
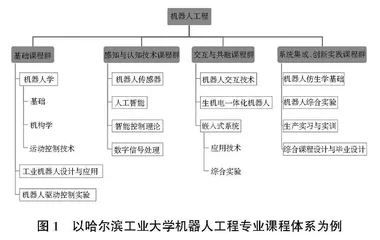
纵观当前的机器人专业设置及教材编排,有丰富和系统化的内容安排。图1为我国知名高校机器人专业课程设置[6],具有一定的代表性,作为智能制造多学科交叉的机器人工程专业的本科生培养方案中包含数十门不同的课程,涵盖由基础到应用的四大课程群。就国内机器人领域的教材而言,比如《机器人学(第四版)》[7]、《机器人学:基础理论与应用实践》[8]等,较为完善,也有较多的高校在使用。目前国内各高校也纷纷开展机器人领域人才培养[9]。目前,国内高校研究生机器人人才培养更多依托已有的相关专业去完成,如自动化、机械工程、计算机等专业。而国外相关硕士培养项目则发展同样迅速,以密歇根大学硕士(MS-Robotics)[10]项目为例,该培养项目首先包含Math for Robotics和Robotics System Lab帮助学生快速掌握机器人知识,而后着眼于实际应用将课程分为三大类:感知、决策和控制。其他高校如麻省理工学院[11]、加州大学伯克利分校[12]、斯坦福大学[13]纷纷在机器人培养项目上与人工智能技术紧密结合,产出了诸如猎豹机器人、达芬奇医疗机械手、外骨骼系统等杰出的成果。这些高校所采取的“先基础后应用”、与人工智能深度融合的成功模式,为本文探讨的课程改革提供了宝贵的参考和启示。
图1 以哈尔滨工业大学机器人工程专业课程体系为例
从国内外目前的机器人课程设置及教材来看,其特点是详实但分散,软件和硬件由不同的课程来讲解。这种教学模式对于培养本科生的基础知识和基本能力较为适宜,但对于已经具备本科阶段多学科学习和数理基础的研究生而言,无论是授课时长和研究生培养目标,都具有一定的挑战。研究生阶段,他们更需要的是将知识与实际应用场景有机融合,并学习和应用前沿知识。
因此,本文主要面向研究生培养,探讨在当前人工智能时代背景下,机器人领域高阶人才培养的教学模式。尝试通过提升知识理论与应用场景的连通性,以人工智能时代“具身”场景为牵引,逐步融入机器人本体各知识模块,力争让参与本课程的学生及相关自学者能够更加高效地完成相关能力准备。
一 当前课程与改革思路
(一) 当前课程结构
正在开设的机器人与仿生学这一课程中讲授了机器人机构学、运动学、静力学与路径规划和运动控制等面向工业、医疗等领域的刚体机器人本体结构与控制等理论,针对机器人的智能化需求,讲解机器人视觉关键技术。如图2所示。
具体来看,本课程在运动学上,主要讲解了基本旋转矩阵与齐次变换矩阵、四元数、欧拉角等用来描述运动的数学基础知识,以及静力学力雅可比和动力学拉格朗日、牛顿欧拉方法;机器人控制部分包括位置控制PID、力矩控制、工作空间非线性反馈,以及阻抗、力位混合控制;轨迹规划部分包括样条曲线插值,以及关节坐标控价和直角坐标空间的轨迹规划。机器人视觉部分讲解了双目测量、张正友标定法、图像分割和视觉控制等方法。可以看到现有课程以机器人技术中的基础知识为主。知识点涵盖有感知、控制、执行三大部分各个要点。这与其他高校本科机器人基础课程教学逻辑和内容基本相符。
但通过学生反馈与调研后发现,部分学生在本科阶段已经学习过这些基础知识,认为该课程对其帮助不大。一些学生表示,虽然掌握了这些基础知识,但在具体实践项目中的帮助并不显著。还有部分学生认为,课程内容缺乏主线串联,知识点较为分散,导致对知识的理解程度不高。总体来看,机器人课程在多个方面尚有改进空间。尽管大部分学生已具备基础知识,但课程在实际应用和项目操作中未能充分发挥其作用。
(二) 课程问题分析
我们意识到现有课程存在一些问题,包括与实践脱离、不符合研究生群体需求、主线不明显和内容不够凝练等[14]。在课堂上,从运动学、路径规划、动力学到控制学,这些内容相对较为充实,但对于短时限、高阶段的研究生课程而言可能显得过于庞大。例如,在控制部分,我们平行讲解了多种控制方法,然而常用的仅有其中一两种。当前,机器人技术正处于模块化发展的快速阶段,课程中涵盖的知识已经在实际应用中以各种形式封装好,因此在应用实践中,学生只需了解其基本特性即可,无须深入掌握推导等细节。
如图3所示,机器人的发展阶段可分为从L0到L5六个阶段[15]。成熟的工业机器人、家用机器人基本处于L2阶段,可以完成重复的工作却受限于特定工况。而L3及以上层次的机器人,可在多场景下完成多种复杂任务,正是当前快速发展的前沿技术。从事机器人相关项目的研究生通常会在这一领域进行深入探索。目前,诸如特斯拉、谷歌、小米和优必选等科技企业也在深入研发L3阶段的机器人,该阶段机器人的核心技术包括深度学习中的大语言模型(LLM)为机器人提供思维链条与语言交互能力,数据驱动的端到端学习打通从感知到执行一体化训练。相较之下当前课程中的知识内容仍处于L2以下的阶段,与当前机器人发展的前沿知识联系较少,这也导致了课程内容与行业需求存在较大差距。
(三) 改革思路
1 构建知识主线
针对课程中的运动学、控制方法、轨迹规划等部分,需要确立主线,抽取核心要点,去除冗余。通过分析研究生与本科生的课程需求差异,我们发现研究生具备较强的数理基础和知识储备,因此对这部分知识的理解和掌握所需学时较少,课程可以更多地起到查漏补缺的作用。在应用层面上,随着机器人模块化技术的快速发展,我们的目标是让学生能够使用模块化技术,理解其中的内核和基础。相比于追求高分,帮助学生掌握实践能力更为重要。
因此,建议通过一个应用场景来贯穿课程,将知识点与实际应用场景相结合。通过分析一个应用场景所需的知识点,有针对性地进行讲解,从任务需求出发,使所有知识都为解决任务服务。以移动底盘+机械臂抓取场景为例,涵盖相关知识点。这样做可以减少课时的浪费,并更贴合实际机器人从业的需求。
2 增加前沿技术
在研究生阶段,掌握领域内的基本理论是进行科研工作的前提。因此,重视对基本理论的学习至关重要,这为研究生在机器人领域深造奠定了坚实基础。辩证角度来看,在教学内容上不应只是平铺直叙地介绍一些基本理论,这不利于激发学生的灵感和创造性,而应注重教学与科研的有机结合,讲授内容应具有一定的探索性。例如,可以将正在蓬勃发展的“具身”智能相关内容作为课程的一部分,以扩宽其视野并安排学生完成“具身”智能等前沿技术的体验、复现、分享等大作业以实现对最新技术的了解与学习。在知识高原的基础上构造高峰。压缩凝练在L2发展阶段中传统方法的知识量,并增加前沿基于深度学习方法对机器人赋能部分的知识,以跟随业界的脚步,与时俱进。
二 具体改革措施
可以看到一方面需要完成现有知识的精炼,保证基础知识点覆盖到位,同时也要腾出学时给“具身”智能来提供给学生进行探索,为此设计出讲授知识点的双主线与仿真大作业归拢知识点的课程框架来实现课程改革。如图4所示。
图4 基于抓取场景的双线课程知识框架
(一) 紧凑“动、力”主线
对现有知识体系进行精简的核心要点是通过知识唤醒和融汇,构建出“动、力”这条主线。一方面希望通过对知识点讲述的策略以及侧重点进行调整。课程在讲授过程中将机器人课程中的技术点与本科数理课程中的知识点进行相关联。其次是将机器人的各个技术点间相关联。以期提高课程理论部分讲授的效率。
让知识点接地气,机器人作为先进生产力的代表,其本质是由一个个朴素的数学公式搭建而成。在教学中力求让知识点穿透到底,让高阶知识更接地气,让多学科背景的学生都有可切入点。