新工科视域下现代控制理论教学改革思考
作者: 叶倩
摘 要:在新工科背景下,以现代控制理论课程为分析对象,分析教学改革重要性,结合现代控制理论课程特点,对现代控制理论课程的教学内容和教学方法进行改革探索,注重物理概念讲解,避免繁琐数学推导,突出现代控制理论的工程应用背景,并在教学中融入课程思政元素,极大地提升教学效果,提高学生解决实际问题的能力。
关键词:新工科;案例教学;控制理论;课程思政;教学改革
中图分类号:G642 文献标志码:A 文章编号:2096-000X(2025)08-0130-04
Abstract: In the context of the new engineering discipline, the importance of teaching reform was analyzed with the course of Modern Control Theory as the analysis object. Combined with the characteristics of the modern control theory course, the teaching content and methods of the modern control theory course were reformed and explored, emphasizing the explanation of physical concepts, avoiding tedious mathematical derivation, highlighting the engineering application background of modern control theory, and integrating ideological and political elements into the teaching. This teaching reform has greatly improved teaching effectiveness and enhanced students' ability to solve practical problems.
Keywords: new engineering; case teaching; control theory; curriculum ideological and political education; teaching reform
新工科视域背景下,高职院校应该围绕当前高等教育发展的需求,对自身的核心课程教学方法加以改造,以培养出高素质的应用型专业人才[1]。现代控制理论是大专院校自动化专业的一门基础课,在自动化专业教学中发挥重要作用专业[2-5]。然而,由于现代控制理论的教学内容包含大量复杂的数学运算,课程内容更具理论性,概念更抽象,学生不容易理解,学习起来,感觉很困难。
现代控制理论作为工科专业的一门核心课程,它要求学生掌握控制相关理论知识,具备一定的控制系统的实践和创新能力。因此,探索如何在新工科背景下对该课程进行有效改革,培养具有良好工程实践和全面发展的控制工程人才,具有十分重要的意义。
一 现代控制理论课程特点与现状
现代控制理论作为工科自动化类专业的核心基础课,主要包括了系统的建模、分析(能控性、能观性、稳定性)、设计(状态反馈控制、状态观测器)几部分[6]。本课程需要前期基础课程的铺垫,如线性代数和自动控制原理,课程系统地介绍了状态空间描述系统的控制理论。因此,课程要求学生充分了解前期课程知识点,不然存在理论知识断层,不利于新知识的深层学习。
目前,现代控制理论课程教学存在两个困境。一是控制系统相关知识概念抽象,内容比较庞杂,但教学时间有限,导致学生被动接受知识,知识点的消化吸收不深,教学模式单一,进而造成大部分学生对课堂缺乏积极性、学习效率低下。二是由于缺乏具象的案例导引,学生对课程的了解停留在知识点上,导致学生对繁琐的数学推导和系统性能分析过程普遍感到难以理解,从而慢慢降低了学习兴趣。因此,为培养出高素质的应用型专业人才成为必然之举。
二 新工科视域下教学改革思路
(一) 强调控制理论背景和概念
学生经常表现出对控制理论的严重缺乏理解。这个问题也影响了对控制论基本基础的解释,尤其是当涉及建设一个可持续发展的社会。这使得学生对于控制系统的框架理解尤其困难:控制和优化方法,以及控制(控制律)、调节器/控制器(控制装置)和命令(控制信号)。
在现代科学和教学传统中已决定将控制问题分为二阶段:分析和设计。然而,在解决控制问题时,分析问题之间的边界和设计往往是模糊的。“控制律”指的是为了按照规定性能调节系统状态而制定的规则、算法或动作序列,可能涉及诸如能量、空间等方面的限制条件。这个术语通常是用于自动控制理论及相关学科强调行动“调节器”或“控制器”的概念,代表仪器、仪表、机器、转换器或其他装置实现控制律并将其转化为控制信号,然后将其馈送到控制对象。
在介绍系统反馈概念时,首先要引出控制系统的状态取决于外部干扰和控制主体的影响处于活动状态。控制主体的任务,是从系统的视角出发,在考量外部干扰情况下,确保系统状态处于期望状态。自然地,以这种方式运行的控制系统是闭环的控制对象和控制主体形成一个封闭的循环。该反馈可以被解释为反映,主体对客体状态的反映。在控制方法中,一直认为控制主体执行动作,做出决定,发出信号,因此是活动的。如果主体是在解决控制问题时被排除在考虑范围之外,即控制主体的行为变得被动对系统进行数学描述(作为控制具有质量标准的法律)或物理上(例如作为一种力),而原始的物理模型(因此,数学模型)被简化。
课程教学中要突出强调针对控制系统分析问题、建模和设计三个阶段。在第一阶段,选择一个物理对象进行求解进一步的问题。例如用机器人操纵物体移动,机器人的机械手或移动的物体都可以在此阶段被视为控制对象,具体取决于即将解决的问题。一个人通常会做这个以常识为指导的决策。对照受试者,即工程师、研究员等是这里的决策者。在第二阶段,选择控制系统的数学模型,使其充分且实际系统和拟议系统中的时间过程可以对数学模型进行比较。当找到数学模型时,环境从物理到模型,即模型的状态变量创建环境。第三阶段聚焦于控制设计问题,涵盖模型简化、控制器控制律的设计、生成以及控制信号的输出等方面。在第一步中,数学模型仅仅代表所选的初始控制系统,是控制设计规则的构成要素之一。控制设计包含理论与实践两个维度。若问题侧重于理论层面,由控制工程师、研究员等专业人员参与解决不失为一种方案;若问题侧重于实践层面,则需对控制器进行设计并使其产生控制信号。
引入术语“闭环系统”非常重要。在闭环系统中,经过设计的控制要素(如控制规则、控制装置、控制信号等)作为输入信号,针对真实的物理系统,必须生成相应信号,并将其传输至系统的输入端。如果物理系统处理输入具有规定性能的信号,初始控制问题得到了正确的解决,这意味着闭环物理系统再次需要分析,形成了一个三阶段的循环。
从理论教学和实践环节教学等方面,逐步培养学生在该方向的理论知识积累和实践应用能力,在相关的教学环节设置上,有效实现学生综合控制理论知识解决控制领域工程问题的目标,以期学生将理论与实际结合。通过给出具体的工程问题和设计复杂的实践环节,挖掘学生的主动性和合作性,全面培养他们在控制理论工程领域运用专业知识解决复杂工程问题的能力。
(二) 引入实际系统案例促进理解
鉴于现代控制理论课程的特点,基于实际系统案例的教学设计有助于学生学习控制理论。目前,许多学校已经研究并开办了倒立摆控制系统课程。倒置的应用摆锤控制系统在教学中长期受到人们的关注,它被公认为现代控制理论中的典型实验设备以及控制理论教学和科学研究中罕见的典型物理模型。通过引进一级倒立摆教学实验系统,使学生能够从理论上更多地了解倒立摆机电系统的控制过程。
本课程理论性强、实践性强,学生在理解和掌握基本概念方面存在一定困难。结合倒立摆系统的实例,在现代控制理论课堂教学、随堂讨论和课后作业中设计相应的控制实例,有助于提高教学效果。
现代控制理论的教学内容重点包括建模、系统定量求解、稳定性、能控/能观性和极点配置。结合实际工程案例“倒立摆系统”传授现代控制理论教学内容,它不但能激发学生兴趣,还能丰富教学方式,让课堂氛围生动有趣。通过该工程案例在教学实验及理论研究中的应用,现代控制理论的教学实践表明,该案例可以满足验证、开放、设计等不同要求。通过该案例的系统学习,学生可以理解从控制系统的理论概念到具体的控制实现,改变了以往的教条模式,实现了理论与实践的结合[7]。
由张嗣瀛、高立群主编的《现代控制理论(第2版)》[6],在第2.3章节状态空间表达式的建立、第4.2章节定常连续系统的能控性、第6.2章节极点配置和第6.4章节状态观测器的课堂教学中,教学内容的常规教学在这里不做具体阐述。这里主要介绍结合学生的特点和课程教学实践,在现代控制理论教学中应用“倒立摆系统”案例的教学设计过程,说明该教学手段可以产生良好的教学效果。
教学中根据不同的教学要求和课时,有选择地安排教学内容,有意识地结合实例来加深学生对知识的理解,重点讲解分析问题和解决问题的思路和方法,并由此激发学生的学习热情。教学中注重工程性内容的引入,有助于理论和实际相结合,培养学生的工程概念和能力。
实例式教学法是以循序渐进实例为手段,贯穿课程各章节,融入新知识点到案例中,力求使学生由浅入深,抓住重点,对现代控制理论有较全面和较深入的理解。教学设计中注重体系的基本结构,强调控制理论的基本概念、基本原理和基本方法,重点突出,不以细节为主。始终贯穿一条主线,数学模型→基本性质分析→系统的综合与设计。
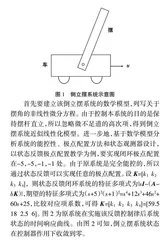
以分析“倒立摆系统”为例,图1所示倒立摆系统是一个典型的单输入多输出的控制系统,它包含一个小车和一个装在小车上的倒立摆杆。小车由电机驱动,电机在小车上施加水平方向的力。我们希望摆杆始终保持垂直的状态,但是由于系统不可避免地存在各种扰动,如风、抖动或是其他的原因,使得摆杆倾斜。因此,需要通过不断地检测摆杆的偏移角了解其所处的状态,并通过移动小车来使得摆杆的偏移角和角速度都尽可能保持在零的位置,且在每一控制过程结束后,小车都将返回参考位置。
图1 倒立摆系统示意图
首先要建立该倒立摆系统的数学模型,列写关于摆角的非线性微分方程。由于控制本系统的目的是保持摆杆直立,所以忽略微不足道的高次项,得到倒立摆系统近似线性化模型。进一步地,基于数学模型分析系统的能控性、极点配置方法和状态观测器设计,以状态反馈极点配置教学为例,要实现闭环极点配置在-5,-5,-1,-1处。由于原系统是完全能控的,所以通过状态反馈可以实现任意的极点配置。设K=[k1 k2 k3 k4],则状态反馈闭环系统的特征多项式为|sI-(A-bK)|,期望的特征多项式为(s+5)2(s+1)2=s4+12s3+46s2+60s+25,比较对应项系数,可得K=[k1 k2 k3 k4]=[59.5 18 2.5 6]。图2为原系统在实施该反馈控制律后系统状态的时间响应曲线。由图2可知,倒立摆系统状态在控制器作用下收敛到零。
(三) 灵活运用不同教学方法融入教学设计
教师的工作是尽可能多地参与,同时不要过于专横。这突出了根据授课时间确定授课材料时间的重要性;包含相对于学习目标的内容是有利的,但不要压倒,因为这可能会变得不切实际。目前的授课方法是询问教室里的学生,“他们是否理解了课程内容的某个知识点”。如果是,我们继续下一个模块,如果不是,我们重点重复,从不同的角度提出这个概念。采用合作学习的方法会让人想起“我们学得更好;当我们一起学习时”一些美好的回忆。