一种小型电动微耕机的设计
作者: 齐兴源 林蜀云 王应芬 刘春波 于家翼
摘要 针对传统微耕机抖动大、噪音大、行走不方便以及保护措施欠缺等问题,设计了一种小型电动微耕机,设计机具作业幅宽60 cm,作业深度大于8 cm。通过计算,微耕机的动力输出电机选取功率2.2 kW、电压72 V的直流电机,按照作业工况,对微耕机的变速箱、传动比以及齿轮进行了设计,并对关键零部件进行了校核,强度满足设计要求。按照实际工作要求,对电池容量进行估算选型,选用120 A·h锂电池作为供电电池,最终建立整机的三维模型。相比传统的汽油动力和柴油动力,电动式微耕机在茶园、大棚种植等方面优势更加明显,除了无污染,还有振动小、转速可调性等优势,具有广阔的市场应用前景。
关键词 微耕机;机械化;丘陵山地;设计
中图分类号 S220.2 文献标识码 A 文章编号 0517-6611(2024)14-0174-04
doi:10.3969/j.issn.0517-6611.2024.14.038
Design of a Small Electric Micro Tiller
QI Xing-yuan,LIN Shu-yun,WANG Ying-fen et al
(Guizhou Mountainous Agricultural Machinery Research Institute,Guiyang,Guizhou 550001)
Abstract In response to the problems of large shaking,high noise,inconvenient walking,and lack of protective measures in traditional micro tillers,a small electric micro tiller was designed,with a designed width of 60 cm and a depth of more than 8 cm.Through calculation,a DC motor with a power of 2.2 kW and a voltage of 72 V was selected as the power output motor of the micro tiller.According to the operating conditions,the gearbox,transmission ratio,and gears of the micro tiller were designed,and key components were verified to meet the design requirements.According to actual work requirements,estimate and select the battery capacity,select 120 A·h lithium battery as the power supply battery,and ultimately establish a three-dimensional model of the entire machine.Electric micro tillers have more obvious advantages compared to traditional gasoline and diesel power in tea gardens and greenhouse planting.In addition to being pollution-free,they also have advantages such as low vibration and adjustable speed,which have broad market prospects.
Key words Micro tiller;Mechanization;Hilly and mountainous areas;Design
基金项目 贵州山地高效农机创新试验基地建设项目(黔科合服企〔2023〕005);黔南州科技攻关计划项目(黔南科合〔2023〕03号)。
作者简介 齐兴源(1991—),男,甘肃酒泉人,工程师,硕士,从事山地农机装备研究。*通信作者,女,贵州遵义人,正高级畜牧师,从事畜牧及畜牧机械装备研究。
收稿日期 2023-10-10
旋耕机作为一种耕作机械,诞生于19世纪中期,在国外经历了将近150多年的发展,现在技术相对趋于完善[1-2]。在我国其发展历程大致如下:南北方地区大面积使用,在部分地区甚至替代了传统的翻伐犁,其耕作幅宽和功率变化较大,1.6~80.0 kW的旋耕机均有。在北方或平原为主的省份,采用的基本都是悬挂式拖拉机牵引的组合方式,而针对南方丘陵山地这一组合方式限制颇多,使用相对较少[3-5]。在这种情况下,2000年前后,小于7.5 kW的微型耕耘机诞生,除了传统旋耕以外,还可用于田间管理、果园园艺等领域,由于其高适应性被大面积应用[4]。但是,微耕机在使用过程中,抖动大、保护措施欠缺等问题逐渐凸显,尤其是在一些对排放要求较高的作业地区,微耕机的弊端则暴露更加明显[5-6],比如:茶园、大棚等,微耕机的排放多是不达标的,对作物品质影响较大,而电驱动相比传统的汽油动力和柴油动力优势更加明显,除了无污染,还有振动小、转速可调性等优势[7-8]。按照这种思路,笔者设计了一款小型电动微耕机,在蔬菜大棚、茶园等领域拥有广阔的应用前景,供行业领域人员参考。
1 结构方案与工作原理
1.1 常规微耕机的构造及工作原理
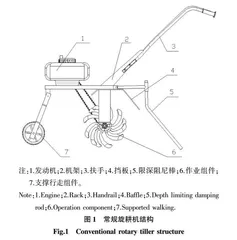
如图1所示,常规动力微耕机主要由动力组件、传动组件、作业组件、机架及扶手等组成,工作时,通过发动机旋转,驱动传动组件完成减速,一般转速不超过300 r/min。旋耕组件一般为1~4组刀辊组成,动力越大,旋耕刀越多,常规小动力旋耕机以2~3组最多,可以兼顾效率和便携性,作业时,操作人员通过下压扶手或上提扶手来控制耕深,限深阻尼棒可以有效限制最大深度和前进速度,保证作业安全性。微耕机在作业时抖动极大,对操作人员双手伤害较大[9]。由于其没有主动行走装置,所以行走依靠旋耕组件带动整机前进。
从上面的阐述可以看出,微耕机组成相对比较简单,但是微耕机目前还面临较多技术问题有待解决。比如:微耕机作业时,刀辊既是耕作部件又是驱动部件和行走部件。刀辊是微耕机主要振动源,主要由刀片切削土壤时土壤对刀片的冲击振动引起。微耕机的振动问题及其使用和操作不便问题较多[10]。
1.2 电动微耕机的设计方案
微耕机一般采用两轮和四轮2种驱动方案。两轮驱动方案与常规旋耕机一致,也就是作业旋耕组件兼顾行走和旋耕2个功能,转场时,通过更换旋耕组件为行走轮,便于路面行走,作业时,同样依靠旋耕组件带动整机行走,依靠限深阻尼棒限制前进速度,这种方案结构简单,成本低,但是大量能量消耗在限深组件上,同时不易操作,所以,近年来也有部分两轮驱动旋耕机增加辅助轮来便于控制,但是改进有限[11]。四轮驱动方案则是行走与作业组件分开,前轮或后轮长期存在1对行走轮,另外1对为作业轮组,可以更换行走轮来作业,作业时1对主动行走,1对作业,由于有专用行走轮,不需要旋耕组件兼顾行走,所以操作更为简单,也无需额外设置阻尼组件来限制速度,可以通过离合和调速来控制行走速度。因电动微耕机要求作业稳定,减少电池振动,显然四轮的设计对于减震效果更佳,稳定性更好,便于转向,操作人员更加舒适,故该研究采用四轮驱动方案。在布局上,一般分为前置和后置2种方式,前置主要是旋耕作业组件处于前行走轮,后置则类似,旋耕作业组件处于后行走轮,无论哪一种方式,都可以实现行走,前置则是通过上提扶手实现耕深控制,反之则是通过下压控制,所以在本质上差别不大。考虑到前置行走轮可以在转向时更加容易操作,后轮行走在部分边角位置,作业边界更大,针对部分边角作业效果更好,故该设计采用前置旋耕组件。
如图2所示,该设计的小型电动微耕机主要由旋耕组件、蓄电池、传动组件、电机、行走组件、控制组件等部件组成,其中旋耕组件选择2~3组旋耕刀,传动组件则是齿轮传动机构,也是该设计重要机构,控制组件则是包括扶手、控制杆等零件组成,完成对整机的操控。
2 关键零部件的设计
2.1 电机的选型
2.1.1 作业参数计算。
按照一般微耕机的作业标准[12],耕作深度设计为8~10 cm,幅宽设计为60 cm,作业效率0.1 hm2/h。按照作业效率,计算机具作业前进速度(Vm):
Vm=0.19×15×sB
式中:s为生产效率(hm2/h),本设计为0.1 hm2/h;B为作业幅宽(m),本设计为0.6 m。
通过计算得出机具作业前进速度Vm=0.48 m/s。进一步,按照行走轮设计直径为320 mm,可以确定行走转速为28.7 r/min,考虑空载行走速度要达到1.2 m/s左右,行走转速要达到71.8 r/min,为便于计算,可取75.0 r/min。作业转速一般为190.0~380.0 r/min,取250.0 r/min。
2.1.2 电机功率估算。
旋耕机作业功率与切削深度、切削宽度、作业深度、土壤黏度等多个因素都存在直接关系,难以直接进行估算,所以在获得微耕机功率过程中,一般是假定理想状态进行求解,首先假定作业为水平田地面,而不是坡度,然后根据以下公式计算作业所需功率:
P=0.1×Kλ×d×Vm×B
式中:Kλ为旋耕比阻(N/cm2),即为单位长度的阻力大小;d为耕深(cm),根据该设计平均耕深计算,取9 cm;
Vm为作业速度(m/s),根据前文计算,为0.48 m/s;B为作业幅宽(m),本设计为0.6 m。
进一步计算Kλ,根据《农业机械设计手册》[13],按照比阻计算公式Kλ=KgK1K2K3K4,查得Kg=16 N/cm2,K1=1.00,K2=0.90,K3=0.80,K4=0.66,则可计算得出Kλ=7.6 N/cm2。再计算得出P=0.1×7.6×9×0.48×0.6=1.97 kW。按照行走功率为0.1~0.3倍作业功率,取0.1倍,则所需功率为Pca=1.1 P=2.18 kW。
根据计算结果,初步选择电动机:合力ZLCF直流有刷电机,额定功率2.2 kW;额定转速3 000 r/min;净重15 kg。
2.2 旋耕刀的设计及布局
旋耕刀是旋耕机的主要工作部件,刀片的形状和参数直接影响旋耕的工作质量,目前国内外对旋耕刀刃口曲线形状和结构参数作了大量研究,就横轴旋机上的刀齿而言主要有刚性和弹性两大类。如图3所示,在排列刀片的过程中,为了解决旋耕机工作时向侧边输土的问题,可以使左右刀片的2条螺旋线不连续,而且旋向不一样,并且相邻区段螺旋线的旋向相反;在焊接左右刀片的时候,同一回转平面的左右弯刀的间隔夹角应该在90°~180°,因此确定一个刀座上同一回转平面的两把刀的间隔夹角为180°。
2.3 变速箱传动设计
2.3.1 传动方案设计。从电动机到旋耕机刀轴,效率传递包括离合器、联轴器、滚动轴承、圆柱齿轮、皮带轮、链轮等的传递,所以需要充分考虑功率。初步拟定传动方案如图4所示,其中行走驱动轴为8轴,作业驱动轴为5轴。
2.3.2 各轴输入功率计算。按照《农业机械设计手册》[13]中传递效率定义,离合器η1=0.99,联轴器η2=0.99,轴承η3=0.99,圆柱齿轮η4=0.96,皮带轮η5=0.96,则计算得出各轴的输入功率(kW)分别为:
P1=P0η1η3=2.20×0.99×0.99=2.16
P2=P1η3η4=2.16×0.99×0.96=2.05
P3=P2η3η4=2.05×0.99×0.96=1.95
P4=P3η5η2=1.95×0.96×0.99=1.85