瓜菜自动嫁接机的设计
作者: 田红梅 蔡奎 陶珍 杨积山 张建 王川 王朋成 林茂先
摘要 针对瓜菜嫁接育苗人工嫁接效率低、专业嫁接工人需求量大、嫁接质量不稳定等作业耗时耗力的问题,设计自动瓜菜嫁接机,实现砧木、接穗苗切割、贴接、包扎、下料等嫁接工艺流程的自动化,大大减少了嫁接工人的劳动强度。该嫁接机器使用卧式滚筒多工位贴接方式进行瓜菜嫁接,采用四工位四模组的结构基础,将嫁接流程简单化、分布化、并行化,实现机械精准、稳定、高效自动化嫁接。瓜菜嫁接机的定位精度为±0.2 mm,实现了种苗的高精度嫁接。瓜果嫁接机的嫁接速率为1 401.0株/h,嫁接成功率为98.8%,嫁接壮苗率为98.0%,达到了快速、优质的嫁接育苗目标。
关键词 嫁接机;嫁接效率;瓜菜;种苗
中图分类号 S 22 文献标识码 A 文章编号 0517-6611(2024)23-0197-04
doi:10.3969/j.issn.0517-6611.2024.23.043
Design of Automatic Grafting Machine for Vegetables
TIAN Hong-mei1, CAI Kui2, TAO Zhen1 et al
( 1.Institute of Vegetable Crops, Anhui Academy of Agricultural Sciences, Hefei, Anhui 230031;2.Hefei Jiafute Robot Technology Co., Ltd., Hefei, Anhui 230088)
Abstract Aiming at the problems of lower efficiency of manual grafting, great demands of professional grafting workers and unstable grafting quality, an automatic vegetable grafting machine was designed to automate the grafting process such as cutting, pasting, wrapping, and cutting rootstocks and scion seedlings, which greatly reduced the labor intensity of grafting work . This grafting machine used a horizontal drum multi station grafting method for grafting, and adopted a four-station and four-module structural foundation to simplify, distribute, and parallelize the grafting process, which achieved automatic grafting accurately, stably, and efficiently. The positioning accuracy of the grafting machine was ± 0.2 mm, which achieved high-precision grafting of seedlings. The grafting rate was 1 401.0 plants per hour. The grafting success rate was 98.8%, and the strong seedling rate was 98.0%, which achieved the goal of fast and high-quality grafting seedling cultivation.
Key words Grafting machine;Grafting efficiency;Vegetables;Seedlings
基金项目 安徽省揭榜挂帅项目(2022296906020002);安徽省农业科学院科技成果转化项目(2024YL035)。
作者简介 田红梅(1980—),女,山东无棣人,副研究员,博士,从事蔬菜新品种选育、种苗繁育及绿色栽培技术研究。
*通信作者:王朋成,研究员,从事蔬菜育种、育苗及绿色栽培技术研究;林茂先,研究员,从事机器视觉、人工智能等方面研究。
收稿日期 2024-03-25
当前蔬菜嫁接技术已成为解决连作问题的重要措施,在世界范围内得到了广泛应用[1]。目前,我国嫁接育苗主要依靠人工嫁接作业,存在嫁接效率低、缺乏专业嫁接工人、嫁接苗姿态一致性不高、嫁接质量不稳定等问题,不利于嫁接种植高效优质发展。嫁接机器人在解决用工短缺、提高种苗生产质量和效率、保障嫁接生产的时效性等方面具有重要作用,其市场需求潜力巨大,应用前景非常广阔[2-3]。嫁接机器人研发较早的国家有日本、韩国、荷兰等,基于不同的嫁接方法研发出多种类型的嫁接机。近年来,日本GR800型半自动瓜科嫁接机嫁接成功率在90%以上,嫁接生产效率为800株/h[4];西班牙EMP300型全自动茄果类蔬菜嫁接用机生产效率为400~600株/h,嫁接成功率在98%以上[5];韩国GR-800CS多功能全自动嫁接机生产效率为800株/h,嫁接成功率达95%[6];荷兰ISO Graft 1100型蔬菜全自动嫁接机生产效率达1 000株/h,嫁接成功率在99%以上[7]。虽然许多国家已经开发出多种全自动嫁接机,但存在价格高、体积大、生产模式和育苗技术不同等问题,不利于其在我国广泛推广[8]。我国蔬菜嫁接机的相关研究起步较晚,全国首台嫁接机装置及原理简单,嫁接成功率在60%左右,此后相继研发的蔬菜嫁接机从控制原理上增加了PLC等技术,生产效率为800~1 000株/h,嫁接成功率为90%~95%。由于大部分嫁接机械仍处于试验样机阶段,且制造成本高、生产效率低,并没有实现商业化应用。随着我国设施栽培面积的不断扩大,人工嫁接工和低生产率的嫁接机已无法满足国内对嫁接苗的需求,提高嫁接生产效率已迫在眉睫[9-10]。
2021年合肥佳富特机器人科技有限责任公司与安徽省农业科学院园艺研究所开展产学研合作,联合推出了“JFT-A1500T”自动嫁接机器人,2023年它被评为安徽省十大创新农机产品之一。该嫁接机器使用卧式滚筒多工位贴接方式进行瓜菜嫁接,采用四工位四模组的结构基础,将种苗嫁接流程简单化、分布化、并行化,实现机械精准、稳定、高效自动化嫁接,嫁接成功率在98%以上。
1 基本结构及机械参数
1.1 基本结构
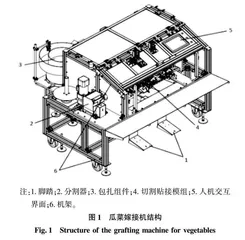
瓜菜嫁接机由机架、分割器、包扎组件、切割贴接模组、人机交互界面、脚踏组成,如图1所示。机架是机器的整体框架;分割器用于机器的主轴旋转;包扎组件完成取夹、捏夹、送夹功能;切割贴接模组实现砧木接穗的胚轴夹持和横向贴接功能;人机交互界面可以记录嫁接效率、嫁接时间、嫁接株数;脚踏是实现上苗工位胚轴夹持的信号触发。
切割贴接模组(图2)主要由夹持部件(图3)和切割部件(图4)组成。包扎模组主要由嫁接夹直振机构(图5)和送夹机构(图6)组成。夹持部件采用横向手指气缸装配夹爪工件,并在夹爪上贴上海绵进行配合,可以完成种苗胚轴夹持功能,既不会伤苗又可以夹紧胚轴。切割部件采用直线弹簧机构配合双杆气缸完成切割刀具的伸缩功能,实现砧木和接穗的固定角度切割。嫁接夹直振机构是利用圆、直通道使杂乱的嫁接夹有序排列、一个个振动前进,进入嫁接夹盒中供取夹机构使用。送夹机构通过横向滑轨气缸将嫁接夹送到嫁接夹夹爪上。
1.2 整机参数
整机参数如下:整机尺寸1 650 mm×1 630 mm×1 270 mm,整机重量300 kg,额定功率1.0~1.5 kW,耗气量<300 L/min,嫁接效率≥1 200 株/h,嫁接成功率≥98%。
2 嫁接机结构设计
2.1 结构创新
结合以往的嫁接机设计结构,该设计在结构上做出了修改和创新,极大地提高了嫁接效率。创新点如下:
①该机器采用的横向贴接式结构,将以往的垂直上苗方式修改为水平上苗方式,使上苗的速度得到了极大提高;
②该设计采用滚筒式旋转结构,将嫁接的流程动作分解到各个工位上,形成流水线式嫁接;
③采用四工位四模组的方式进行嫁接,可同时使多株苗在不同工位进行嫁接,使以往的串行动作改为并行动作,使嫁接效率得到了提高;
④根据嫁接夹的特征,采用圆振加直振的方式运输嫁接夹,在圆振中将杂乱的嫁接夹有序排列、一个个输送出来,直振将嫁接夹传输到嫁接夹盒中,供取夹机构使用。
2.2 工作流程
该机器的动作流程分四工位进行嫁接(上料→切割→包扎→下料),将所有嫁接流程依据工位进行动作,具体流程如图7所示。
上料工位负责砧木和接穗的上料夹持,完成砧木和接穗上料后,切割贴接模组进行胚轴夹持,对砧木和接穗实施固定,当人手离开安全光幕后,机械分割器90°旋转,到达切割工位。切割工位上完成砧木和接穗苗的切割,并将胚轴托
苗机构下降,便于砧木和接穗的横向贴接。包扎工位上进行
接
穗贴接,接穗通过贴接气缸送往砧木固定位置,在贴接过程
中由送夹机构和托苗板进行限位,同时完成二次贴接过程,
将嫁接夹打开,实现包扎动作。下料工位将已经嫁接完成的成品苗进行输送,完成胚轴夹持打开,拨苗气缸进行拨苗动作,成品苗从主机落到成品苗输送带上传输出去。嫁接机的动作属于并行动作,4个工位同时进行,提高了嫁接效率和嫁接成功率。
2.3 运动系统设计
该设计中的动力系统采用电机和气缸配合运动,如图8所示。
根据嫁接的工艺设计,嫁接机的定位精度为±0.2 mm,使用伺服电机通过联轴器连接丝杆,丝杆上的负载组件在滑轨上进行运动。丝杆螺距为10 mm,伺服电机一圈的脉冲为1 000,转矩为0.608 N·m,转速为1 800 r/min,负载重量为9 kg。根据嫁接的需求,选择三菱伺服电机,伺服驱动型号为DS2P-04AS。
2.4 参数的计算
2.4.1 电机功率的计算。
根据转矩和转速的要求,进行电机的功率计算选型。
P=T×N/9 550(1)
式中,P为电机功率(W),T为转矩(N·m),N为转速(r/min)。
2.4.2 转矩的计算。
转矩的计算公式如下:
T=P×9 550/N(2)
2.4.3 转速的计算。
根据不同的运动方式,输出功率(Pb)计算公式为Pb=F×v(直线运动),Pb=T×ω(圆周运动)。其中,F表示受力,v表示线速度(m/s),T为转矩(N·m),ω为角速度(单位rad/s)。
电机转速计算公式如下:
N=v×1 000×60/(2πR)(3)
式中,R为半径,单位m。
物体转速计算公式如下:
N=v×60×1 000/Pb(4)
2.4.4 负载的计算。
水平直线运动时,负载的计算公式如下:
F=μmg(5)
式中:F代表负载(单位N);μ代表摩擦系数,这是一个无量
纲的数值,用于描述2个接触表面之间的摩擦程度。摩擦系
数的大小取决于接触表面的材料和粗糙程度。m代表物体
的质量,单位为kg。
g代表重力加速度,约9.8 m/s2。
竖直运动时,负载的计算公式如下:
F=mg(6)
3 机器3D模型的建立
根据各部件设计参数,完成瓜菜嫁接机各工作组件的三维建模,利用SolidWorks建立整机虚拟样机。在整机装配之前,考虑各个组件、部件之间的位置关系,然后根据装配标准和装配步骤装配。瓜菜嫁接机总装三维图如图9所示。经安装检查,各机构的装配位置合理,运动流畅,不存在机构干涉。