结合“三位一体”的理实一体化教学模式探索
作者: 张洪玉 尹文生 柴智敏
摘 要:不断探索新工科的教学模式是推动中国高等工程教育、助力高等教育强国建设的重要举措。开展基于理实一体化的教学创新设计,深度融合课堂讲授与创新实践的教学模式有助于培养学生对于所学知识的综合运用,对加强本科生主动学习能力以及系统性分析和解决工程实际问题的能力具有良好的促进作用。该文结合清华大学价值塑造、能力培养、知识传授“三位一体”教育理念,以本科生课程智能机电系统实践为例,进行理实一体化教学改革探索。该课程通过优化理论知识与工程技术知识的课堂讲授环节和以完成任务目标为导向的创新实践环节,显著加强本科生从课堂知识学习向动手实践转变的能力。
关键词:新工科;三位一体;理实一体化;智能机电;创新实践
中图分类号:G642.3 文献标志码:A 文章编号:2096-000X(2024)28-0021-04
Abstract: Constantly exploring the teaching mode of new engineering is an important measure to promote China's higher engineering education and help build a powerful higher education country. The innovative teaching design based on the theory-practice integration and the teaching mode of in-depth combination of classroom teaching and innovative practice are helpful to further cultivate students' comprehensive application of the knowledge they have learned, and meanwhile play a significant role in promoting the active learning ability of undergraduates and their ability to systematically analyze and solve practical engineering problems. Based on the "three-in-one" education concept including value shaping, ability cultivation and knowledge impartation of Tsinghua University, this paper takes the undergraduate course of Intelligent Electromechanical System Practice as an example to explore the theory-practice integrated teaching mode. By optimizing the classroom teaching of theoretical knowledge and engineering technology knowledge and the task goal-oriented innovation practice, this course significantly strengthens the ability of undergraduates to transform from classroom knowledge learning to hands-on practice.
Keywords: new engineering; three-in-one; theory-practice integration; intelligent mechatronics; innovative practice
随着先进制造业和高等教育规模的不断发展和扩大,以智能制造和机器人等领域为主的新工科和新兴产业对工科高等教育教学提出了新的要求,高校教学改革和创新面临着新的机遇和挑战[1]。
在这个背景下,理实一体化教学模式应运而生,成为高等教育的创新教学模式之一。理实一体化教学模式将课堂教学和实践教学相结合,理论与实践相互融合、相互支撑,实现知识的内化和运用的外化。与传统的课堂教学模式相比,理实一体化教学模式更加注重培养学生的实践能力和综合素质,能够有效提高学生的学习兴趣和自主学习能力,培养创新思维和实践技能,以满足现代社会对高素质人才的需求[2-3]。然而,目前这一教学模式仍然需要深入探索。如何平衡课堂与实践的比重、选择合适的教学方法、评价学生的实践能力等问题,需要教师在教学设计和实施过程中优化解决方案,以促进理实一体化教学模式的教学成效。
为探索理实一体化教学模式,增强学生知识水平和实践能力,清华大学机械工程系为未央书院“数理基础科学+机械工程”专业学生开设了一门本科生专业必修课程——智能机电系统实践,授课对象为二年级本科生。为深入贯彻清华大学价值塑造、能力培养、知识传授“三位一体”教育理念以及未央书院成人成才、通专融合、本博贯通的培养目标,本课程教学团队在教学内容与教学模式等方面进行了一系列改革探索,旨在使学生能够将机械设计、测控原理、计算机软/硬件等知识综合运用,并掌握图像处理、单片机编程等相关技能,从而提升学生主动学习能力、创新思维与解决复杂问题能力以及团队合作、组织领导能力,并取得了良好的教学成效。
在一定程度上优化教师课堂讲授学时、加强学生实践动手操作,达到学以致用,是当前高校机电类课程教学改革的一个重要方向[4-6]。经调研发现,国内外高校开设了一些类似课程,如华中科技大学机电创新决策与设计方法、上海交通大学机电系统设计与实践、斯坦福大学Smart Project Design以及麻省理工学院Autonomous Robot Design Competition等。这些课程对培养学生创新能力和实践能力发挥了非常积极的作用。以麻省理工学院开设的课程为例,其利用各种乐高模型搭建智能小车,实践内容包括单片机编程、电路设计、颜色识别、电机控制以及路径规划算法等,但未包含机械结构设计与加工环节。与国内外高校开设的同类课程相比,智能机电系统实践的课程目标是启发和指导学生自主设计、加工、组装、编程并调试获得基于机器视觉和智能抓取的一体化机电系统。该一体化机电系统的主要功能如下:①具有机器视觉,可识别特定物体,并能通过机械手完成抓取;②具有自动导航、路径规划以及自主定位功能;③系统能够稳定运行,动作可重复性良好,并具有较高的控制精度。这门课程的实施不仅优化了教师课堂讲授学时,加强了学生实践动手操作,更重要的是,使学生能够将所学知识快速应用于实践当中,从而达到学以致用的目的。采用这种教学模式不仅提高了学生的实践能力和综合素质,还为学生未来的职业发展奠定了坚实的基础。
一 理实一体化教学内容与模式
(一) 课程教学环节
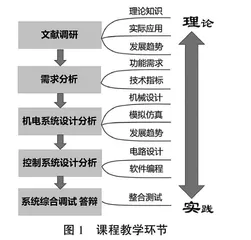
为实现上述课程目标,本课程基于理实一体化教学模式,以包含机器视觉的自动寻物与机械臂搬运这一典型智能机电系统为对象,综合运用机械设计、电工电子、图像处理、嵌入式系统以及自动控制理论等知识和其他先修课程,结合工程实际需求,使用机械设计和控制系统仿真等软件工具,通过文献调研、需求分析、机电系统方案设计与运动分析、控制电路硬件设计、视觉处理算法设计、控制硬件编程、系统综合调试与测试、答辩环节,培养学生创新思维以及系统性分析和解决工程实际问题的能力,使所学课堂知识得到进一步巩固、深化和扩展,如图1所示。
在文献调研阶段,学生需要深入研究关于机械设计、电工电子、图像处理、嵌入式系统以及自动控制理论等知识领域的相关文献,并了解当前智能机电系统的最新发展趋势。这一阶段的任务是让学生明确课程的目标,并为后续的实践打下基础。
在需求分析阶段,学生需要了解机械臂搬运和自动寻物技术的应用场景、功能需求以及技术指标等方面的要求。这一阶段的任务是让学生深入理解应用场景和问题需求,为后续的系统设计和开发提供有力支持。
在机电系统方案设计与运动分析阶段,学生需要进行机械结构设计、虚拟样机设计与仿真,通过模拟仿真来完成机械臂的运动规划和路径优化,从而实现机械臂对物品的准确抓取和放置。这一阶段的任务是让学生将知识和技能运用到实践中,并发挥出最大的作用。
在控制电路硬件设计、视觉处理算法设计和控制硬件编程阶段,学生需要对硬件电路进行设计和调试,同时研究和开发机器视觉相关的图像处理算法和控制程序。这一阶段的任务是让学生深入理解硬件电路和软件程序之间的关系,从而实现机械臂对物品的自动抓取和放置。
在系统综合调试与测试阶段,学生需要将所有设计和开发的模块进行整合,并对整个系统进行综合测试。这一阶段的任务是让学生掌握系统综合调试的方法和技巧,完成整个机械臂系统的调试和测试过程,并最终实现系统的稳定运行。
通过上述环节的学习和实践,学生能够更加深入理解机械设计、电工电子、图像处理、嵌入式系统以及自动控制理论等知识,并且能够运用所学知识和技能,从而设计、开发和调试出一个具有自主寻物和机械臂搬运功能的智能机电系统。在此过程中,学生将得到实践锻炼,提高自己的创新思维和实际问题解决能力。在答辩环节,学生需要向教师和同学进行项目演示,并详细介绍小组设计和开发的智能机电系统的功能和特点,并对所完成的工作进行全面的总结和回顾。
综上,智能机电系统实践课程采用了基于理实一体化教学模式的教学方式,通过综合运用机械设计、电工电子、嵌入式系统以及自动控制理论等知识和其他先修课程,培养学生创新思维以及系统性分析和解决工程实际问题的能力,使所学课堂知识得到进一步巩固、深化和扩展。
(二) 课程教授内容
本课程授课时间共5周,在大二学年末暑期授课。具体而言,第一周根据课程要求进行机电系统需求分析与总体方案设计;第二周完成总体方案设计,进行机械结构与控制系统的详细设计与分析;第三周进行零部件加工、采购以及控制系统软件编制;第四周进行机械系统装配与性能测试、控制系统程序编译与硬件调试;第五周进行系统综合调试与测试,完成系统演示、实验报告与答辩。为优化课程考核内容,课程教学团队还设计了单组竞技赛(完成抓取任务用时最短)、多组对抗赛(在规定时间内抓取物品数量最多)等多种形式,在多组对抗赛中采用类似足球比赛的积分制方法,最终决出优胜组,并给予一定奖励。
在基于理实一体化的智能机电系统实践课程教学改革中,为鼓励学生充分发挥积极主导作用,教学采用课堂讲授(方式:教师授课,学生听课并自主学习)与创新实践(方式:学生自主设计、加工、组装、编程、调试,教师指导)相结合的方式。课堂讲授内容包括理论知识和工程技术知识两个层次,创新实践为在十个不同方面的实践训练基础之上,由学生自主设计、加工并调试获得一套智能机电系统,完成特定任务,如图2所示。
1 课堂讲授部分
1)理论知识。①机器人运动学(坐标变换、轨迹规划);②经典控制理论(比例-积分-微分算法,即PID算法);③图像处理原理与方法。
2)工程技术知识。①单片机硬件与接口技术(时钟、总线、定时器、串口、IO);②单片机实时控制程序设计方法(中断、轮询等);③图像处理Python语言编程;④制造工程基础知识(常见加工方法、3D打印等);⑤机械设计基础知识(常用标准件作用、尺寸与配合方式等)。
2 实践训练部分
①智能机电系统结构设计、动力学分析与运动仿真;②视觉传感器电路设计、数据处理与使用;③超声波传感器电路设计、数据处理与使用;④陀螺仪传感器电路设计、数据处理与使用;⑤闭环直流步进电机、舵机驱动与控制;⑥STM32单片机蓝牙串口通信原理与编程;⑦智能机电系统控制模块硬件设计与测试;⑧智能机电系统控制算法设计与软件编程;⑨智能机电系统结构装配与集成;⑩智能机电系统集成调试、测试与优化。
二 教学特色与成效
智能机电系统实践课程融合了机(机械设计与加工:设计并制作机械系统完成目标抓取)、电(电路控制:硬件选型、线路优化、电路调试)、测(机器视觉:传感器选型,实现图像识别与目标定位)、控(机电控制:PID调节完成步进电机控制、路径规划)、软(软件编程:Python、C语言编程)五个方面,如图3所示。本课程与目前国内外高校开设的类似课程有较为显著的区别,具体特色如下:基于课堂讲授并综合运用已学知识和自主学习未知知识,提高本科生动手实践技能;紧密围绕机、电、测、控、软等五个方面设计、加工、布局、组装、接线、编程并调试获得一体化智能机电系统;通过项目实践方式提升学生解决实际问题能力,为后续探索式课程学习奠定良好的基础。